图论

图论
图论是数学的一个分支。它以图为研究对象。图论中的图是由若干给定的点及连接两点的线所构成的图形,这种图形通常用来描述某些事物之间的某种特定关系,用点代表事物,用连接两点的线表示相应两个事物间具有这种关系。
欧拉回路
前置知识
dfs(深度优先搜索)
深度优先搜索是一种在开发爬虫早期使用较多的方法。它的目的是要达到被搜索结构的叶结点(即那些不包含任何超链的HTML文件) 。在一个HTML文件中,当一个超链被选择后,被链接的HTML文件将执行深度优先搜索,即在搜索其余的超链结果之前必须先完整地搜索单独的一条链。深度优先搜索沿着HTML文件上的超链走到不能再深入为止,然后返回到某一个HTML文件,再继续选择该HTML文件中的其他超链。当不再有其他超链可选择时,说明搜索已经结束。
边权
离散数学或数据结构中,图的每条边上带的一个数值,它代表的含义可以是长度等等,这个值就是边权
欧拉路径
如果图中的一个路径包括每个边恰好一次,则该路径称为欧拉路径。
欧拉回路
首尾相接的欧拉路径称为欧拉回路。
判定
由于每一条边都要经过恰好一次,因此对于除了起点和终点之外的任意一个节点,只要进来,一定要出去。
一个无向图存在欧拉回路,当且仅当该图所有顶点度数都为偶数,且该图只有一个存在边的连通块。
一个无向图存在欧拉路径,当且仅当该图中奇点的数量为0或2,且该图只有一个存在边的连通块。
一个有向图存在欧拉回路,当且仅当所有点的入度等于出度。
一个混合图存在欧拉回路,当且仅当存在一个对所有无向边定向的方案,使得所有点的入度等于出度。需要用网络流。
求法
我们用 dfs来求出一张图的欧拉回路。
我们给每一条边一个 vis数组代表是否访问过,接下来从一个点出发,遍历所有的边。
直接dfs并且记录的话会有一些问题。
为了解决这个问题,我们在记录答案的时候倒着记录,也就是当我们通过 (u, v) 这条边到达 v 的时候,先把 v dfs 完再加入 (v, u) 这条边。
还有一点需要注意。因为一个点可能被访问多次,一不小心可能会写成 O(n 2 ) 的(因为每次遍历所有的出边)。解决方案就是设一个cur数组,每次直接从上一次访问到的出边继续遍历。
时间复杂度 O(n + m)。
代码
void dfs(int x)
{
for(int&hd=head[x];hd;hd=e[hd].nxt)
{
if(flag[hd>>1])continue;
flag[hd>>1]=1;
dfs(e[hd].to);
a[++top]=x;
}
}拓扑排序
定义
所谓拓扑排序,就是把有向图上的 n 个点重新标号为 1 到 n,满足对于任意一条边 (u, v),都有 u < v。
并不是所有的图都能进行拓扑排序,只要图中有环,那么就可以导出矛盾。
可以进行拓扑排序的图称为有向无环图(DAG),有很多优美的性质,比如可以在拓扑序上进行 DP(动态规划)。
我们记录一下每一个点的入度和出度,用一个队列维护当前所有入度为 0 的点。 每次拿出来一个入度为 0 的点并且将它加到拓扑序中,然后枚举出边更新度数。 时间复杂度O(n + m)。
(在拓扑排序的过程中可以顺带进行 DP)
代码
for(int i=1;i<=n;i++)
if(d[i]==0)q.push(i);
while(!q.empty())
{
int node=q.front();
q.pop();
res[++top]=node;
for(int hd=head[node];hd;hd=e[hd].nxt)
{
d[e[hd].to]--;
if(d[e[hd].to]==0)
q.push(e[hd].to);
}
}最短路
所谓最短路,就是把边权看做边的长度,从某个点 S到另一个点 T 的最短路径。
用更加数学化的语言描述就是,对于映射 f : V → R,满足 f(S) = 0 且 ∀(x, y, l) ∈ E, |f(x) − f(y)| ≤ l 的情况下,f(T) 的最大值。
单源最短路——Dijkstra
在所有的边权均为正的情况下,我们可以使用 Dijkstra 算 法求出一个点到所有其它点的最短路径。
我们维护一个集合,表示这个集合内的点最短路径已经确定了。
每次我们从剩下的点中选择当前距离最小的点 u 加入这个集合,然后枚举另一个点 v 进行更新:
dv = min(dv, du + w(u, v))
直接这样做时间复杂度是 O(n 2 ) 的。
优化
我们注意到,复杂度主要来源于两个地方。
第一个是找出当前距离最小的点。这个可以用堆很容易地实现。
第二个是枚举 v,如果我们用邻接表存图,可以降到边数级别。
这样我们就把复杂度降到了 O((n + m) log n)。
单源最短路——Bellman-Ford
另一种求单源最短路的算法,复杂度不如Dijkstra优秀。
考虑在上面出现过的松弛操作:
dv = min(dv, du + w(u, v))
由于最短路径只会经过最多 n 个点,因此每一个点的最短 路径只会被松弛至多 n − 1 次。
所以我们可以对整张图进行 n − 1 次松弛操作,每次枚举所有的边进行更新。
时间复杂度 O(nm)。
SPFA
它死了。(不要用,它的复杂度是错误的)
应用:费用流
Bellman-Ford 算法不够优秀,于是我们尝试改进这个算法。
注意到,在进行松弛操作的时候,如果点 u 的距离一直没有发生变化,那么就不需要再枚举这个点的出边进行松弛了。
也就是说我们可以用一个队列保存所有距离发生变化的点, 每次取出一个点进行更新。
于是 SPFA就诞生了。
如果图是随机的,SPFA的期望时间复杂度约为 O(2m),比 之前提到的任何一个算法都优秀,而且还可以有负权。
但是在最坏情况下它的复杂度和 Bellman-Ford 相同,都是 O(nm),在正式比赛中,没有哪个出题人会放过它。(因为其复杂度本来就是错的)
多源最短路——Floyd
对于一张图,我们希望求出任意两个点之间的最短路径。
我们用 DP(动态规划) 的思想。设 fi,j,k 表示从 i 到 j,途中仅经过前 k个点的最短路。
由于每一个点在最短路中只会出现一次(不然就出现负环了,不存在最短路),所以可以很写出转移方程:
fi,j,k = min(fi,j,k−1, fi,k,k−1 + fk,j,k−1)
时间复杂度是 O(n 3 )。
在实际求的过程中,最后一维可以用滚动数组优化掉,所以空间复杂度是O(n 2 )。
代码
for(int k=1;k<=n;k++)
for(int i=1;i<=n;i++)
for(int j=1;j<=n;j++)
dis[i][j]=min(dis[i][j],dis[i][k]+dis[k][j]);
注意三层循环的顺序不能颠倒。
Floyd 传递闭包
有时候,我们需要维护一些有传递性的关系,比如相等,连通等等。(12连通,23连通,则 13连通)
初始条件往往是已知若干个点对具有这些关系,然后让你弄 出来所有的关系。
可以直接把 Floyd 算法做一下调整——
dis[i][j]=dis[i][j]|(dis[i][k]&dis[k][j]);
这个算法叫做传递闭包。
多源最短路——Johnson 重赋权
对于多源最短路,如果我们枚举一个点然后跑堆优化的 Dijkstra,那么复杂度是 O(nm log n) 的,在图比较稀疏的情况下,这个复杂度要优于 Floyd 算法的 O(n 3 )。
但是 Dijkstra 算法要求所有边权均非负。
于是就有了重赋权的技巧。
我们新建一个 0 号点,并且从这个点出发向所有点连一条边 权为 0 的边,然后跑单源最短路。(SPFA 或者 Bellman-Ford)
设距离数组为 h,接下来对于每条边 (u, v),令 w ′ (u, v) = w(u, v) + h(u) − h(v)。
这样所有的边权就都变成非负了,我们就可以跑 Dijkstra 算法了。
证明
首先由于 h(v) ≤ h(u) + w(u, v),新图的边权一定非负。
设新图上的最短路径为 d ′,原图上的最短路径为 d。
d ′ (u, v) = min a1,a2,…,ak w ′ (u, a1) + w ′ (a1, a2) + · · · + w ′ (ak, v)
= min a1,a2,…,ak w(u, a1) + (h(u) − h(a1)) + w(a1, a2)+ (h(a2) − h(a1)) + · · · + w(ak, v) + (h(v) − h(ak))
= h(u) − h(v) + min a1,a2,…,ak w(u, a1) + · · · + w(ak, v)
= h(u) − h(v) + d(u, v)
最短路树(最短路图)
所谓最短路树,就是在求完从 S 出发的单源最短路之后,
只保留最短路上的边形成的数据结构。
只需要在求的过程中维护一个pre数组表示这个点的前驱即可。很多最短路的变种都需要用这个算法。
最小生成树
Prim 算法
类比 Dijkstra 算法,我们维护一个集合 S,表示这个集合中 的生成树已经确定了。
算法流程和Dijkstra一样,唯一的区别是用w(u, v) 去更新 dv 而不是用 du + w(u, v)。
时间复杂度 O(n 2 ),同样可以用堆优化。
Kruskal 算法
前置知识
并查集算法
并查集主要用于解决一些元素分组的问题。它管理一系列不相交的集合,并支持两种操作:
合并:把两个不相交的集合合并为一个集合。
查询:查询两个元素是否在同一个集合中。
优化
路径压缩(O(logn))+安值合并(O(logn))→O(αn)(αn在108数据内不超过4,可视为常数)
代码
find(int x)
{
return x==pa[x]?x:pa[x]=find(pa[x])
}因为是求的最小生成树,所以我们用贪心的思路,把所有的边权从小到大排序,然后一条一条尝试加入,用并查集维护连通性。
可以发现这样一定能得到原图的最小生成树。
证明
如果某一条边 (u, v) 不属于最小生成树,那么考虑最小生成树上 连接 u, v 的路径,这上面一定有一条边权不小于 w(u, v) 的边 (因为我们是从小到大枚举的所有边),这样替换后答案一定不会变劣。
时间复杂度 O(m log m)。
Kruskal 重构树
前置知识
dfs(深度优先搜索)
LCA(最近公共祖先)
在一棵没有环的树上,每个节点肯定有其父亲节点和祖先节点,而最近公共祖先,就是两个节点在这棵树上深度最大的公共的祖先节点。
LCA主要是用来处理当两个点仅有唯一一条确定的最短路径时的路径。
树上倍增
用于求LCA(最近公共祖先)。
倍增的思想是二进制。
首先开一个n×logn的数组,比如fa[n][logn],其中fa[i][j]表示i节点的第2^j个父亲是谁。
然后,我们会发现一个性质:
fa[i][j]=fa[fa[i][j-1]][j-1]
用文字叙述为:i的第2^j个父亲 是i的第2^(j-1)个父亲的第2^(j-1)个父亲。
这样,本来我们求i的第k个父亲的复杂度是O(k),现在复杂度变成了O(logk)。
Kruskal 重构树是基于 Kruskal 最小生成树算法的一种算 法,它主要通过将边权转化为点权来实现。
流程
将所有边按照边权排序,设 r(x) 表示 x 所在连通块的根节点。(注意这里要用并查集)
枚举所有的边 (u, v),若 u, v 不连通,则新建一个点 x,令 x 的权值为 w(u, v)。 连接 (x, r(u)) 和 (x, r(v))。 令 r(u) = r(v) = x。
不断重复以上过程,直到所有点均连通。
时间复杂度 O(m log m)。
性质
这样,我们就得到了一棵有 2n − 1 个节点的二叉树,其中叶节点为原图中的点,其余的点代表原图中的边,并且满足父节点权值大于等于子节点。
它有什么用呢?
求 u, v 之间路径上的最大边权 → 求重构树上 u, v 两个点的 LCA。
只保留边权小于等于 x 的边形成的树 → 重构树上点权小于 等于 x 的点的子树。
Borůvka 算法
前置知识
距离
(x1,y1)(x2,y2)
曼哈顿距离:|x1-x2|+|y1-y2|
切比雪夫距离:max(|x1-x2|,|y1-y2|
欧几里得距离:√[(x1-x2)2+(y1-y2)2]
曼哈顿距离与切比雪夫距离的相互转化
两者之间的关系
我们考虑最简单的情况,在一个二维坐标系中,设原点为(0,0)。
如果用曼哈顿距离表示,则与原点距离为1的点会构成一个边长为2–√2的正方形。
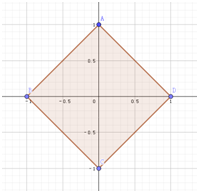
如果用切比雪夫距离表示,则与原点距离为1的点会构成一个边长为2的正方形。
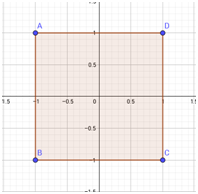
对比这两个图形,我们会发现这两个图形长得差不多,他们应该可以通过某种变换互相转化。
事实上,
将一个点(x,y)的坐标变为(x+y,x−y)后,原坐标系中的曼哈顿距离 =新坐标系中的切比雪夫距离。
将一个点(x,y)的坐标变为((x+y)/2,(x−y)/2) 后,原坐标系中的切比雪夫距离 = 新坐标系中的曼哈顿距离。
(注意:切比雪夫距离转曼哈顿距离要再除以二)
用处
切比雪夫距离在计算的时候需要取max,往往不是很好优化,对于一个点,计算其他点到该的距离的复杂度为O(n)。
而曼哈顿距离只有求和以及取绝对值两种运算,我们把坐标排序后可以去掉绝对值的影响,进而用前缀和优化,可以把复杂度降为O(1)。
第三种求最小生成树的算法,虽然比较冷门但是很多题需要用到这个算法。
我们维护当前形成的所有连通块,接下来对于每一个连通块,找到边权最小的出边,然后合并两个连通块。
不断重复这个操作,直到整张图变成一个连通块。
由于每次操作连通块数量至少减半,所以时间复杂度最坏为 O((n + m) log n),随机图的话复杂度可以降到 O(n + m)。
Tarjan算法
Tarjan 算法不是某个特定的算法,而是一群算法。
强连通分量
割点/割边/桥
点双连通分量
边双连通分量
离线 O(n) 求 LCA
此外还有很多 Tarjan 独立/合作创造的算法:
Splay,LCT, 斐波那契堆,斜堆,配对堆,可持久化数据结构,……
有向图——强连通分量
如果对于两个点 u, v,同时存在从 u 到 v 的一条路径和从 v 到 u 的一条路径,那么就称这两个点强连通。
如果一张图的任意两个点均强连通,那么就称这张图为强连通图。
强连通分量指的是一张有向图的极大强连通子图。 (极大≠最大)
Tarjan 算法可以用来找出一张有向图的所有强连通分量。
我们用 dfs的方式来找出一张图的强连通分量。
建出 dfs 树,记录一下每一个节点的时间戳(dfn),然后我们考虑强连通分量应该满足什么条件。
我们可以再记录一个 low 数组,表示每一个点能够到达的最小的时间戳,如果一个点的 dfn=low,那么这个点下方就形成了一个强连通分量。
在 dfs 的过程中,对于 (u, v) 这条边:
若 v 未被访问,则递归进去 dfs 并且用 low[v] 更新 low[u]。
若 v 已经被访问并且在栈中,则直接用 dfn[v] 更新 low[u]。
最后如果 dfn[u]=low[u],则直接把栈中一直到 u 的所有点 拿出来作为一个强连通分量。
时间复杂度 O(n)。
有向图——缩点
跑出来强连通分量之后,我们可以把一个强连通分量看成一 个点。
接下来枚举所有的边,如果是一个强连通分量里的就忽略, 否则连接两个对应的强连通分量。这个操作称为缩点。
缩点后就变成了一张有向无环图,处理连通性问题的时候会方便很多。
无向图——割点
对于一张无向图,我们希望求出它的割点。
无向图的割点定义为删掉这个点之后,连通块数量会发生改变的点。
类比上面,我们还是记录一下 dfn(时间戳)和 low。
对于 u 的一个子节点 v,若 dfn[u]≤low[v],则 u 是割点(因 为 v 无法绕过 u 往上走)。
不过需要注意两点:
根节点不能用这种方法,而是应该看它的子节点数量是否大于等于 2,如果是那么根节点就是割点。
枚举出边的时候要特判掉父子边的情况。
无向图——桥
无向图的桥定义为删掉这条边后,连通块数量会发生改变的边。
和上面的方法几乎一模一样,唯一的区别是判断dfn[u]<low[v]而不是dfn[u]≤low[v]。(如果从 v 出发连 u 都无法 到达,那么 (u, v) 就是一个桥边)
甚至连根节点都不需要特判了。
无向图——点/边双连通分量
如果两个点之间存在两条点互不相交的路径,那么就称这两个点是点双连通的。
如果两个点之间存在两条边互不相交的路径,那么就称这两个点是边双连通的。
其余的定义参考强连通分量。
割点将整张图分成了若干个点双连通分量,并且一个割点可以在多个点双连通分量中。
而桥则把整张图拆成了若干个边双连通分量,并且桥不在任意一个边双连通分量中。
魔改一下强连通分量算法即可。
当然,无向图也可以缩点,不过主要还是可以用来建圆方树。
二分图匹配
前置知识
匹配
在图论中,一个匹配是一个边的集合, 其中任意两条边都没有公共顶点。
最大匹配
一个图所有匹配中,所含匹配边数最多的匹配, 称为这个图的最大匹配。
如果要求一般图的最大匹配,需要用 O(n 3 ) 的带花树,至少 是 NOI+ 的算法。在联赛阶段,我们一般只关注二分图的匹配问题。
最大匹配——匈牙利算法
完美匹配
如果一个图的某个匹配中,所有的顶点都是匹配点,那么它就是一个完美匹配。
二分图
如果一个图的顶点能够被分为两个集合 X, Y,满 足每一个集合内部都没有边相连,那么这张图被称作是一张二分图。
(dfs可以判断一张图是否是二分图)
交替路
从一个未匹配点出发,依次经过非匹配边——匹配 边——非匹配边——……形成的路径叫交替路。
增广路
从一个未匹配点出发,依次经过非匹配边——匹配 边——非匹配边——……——非匹配边,最后到达一个未匹配点形成的路径叫增广路。
注意到,一旦我们找出了一条增广路,将这条路径上所有匹配边和非匹配边取反,就可以让匹配数量+1。
匈牙利算法就是基于这个原理。
假设我们已经得到了一个匹配,希望找到一个更大的匹配。
我们从一个未匹配点出发进行 dfs(深度优先搜索),如果找出了一个增广路, 就代表增广成功,我们找到了一个更大的匹配。
如果增广失败,可以证明此时就是最大匹配。
由于每个点只会被增广一次,所以时间复杂度是 O(n(n + m))。
二分图最大权匹配——KM 算法
现在我们把所有的边都带上权值,希望求出所有最大匹配中权值之和最大的匹配。
我们的思路是给每一个点赋一个“期望值”,也叫作顶标函数 c,对于 (u, v) 这条边来说,只有 c(u) + c(v) = w(u, v) 的时 候,才能被使用。
容易发现,此时的答案就是 ∑c(i)。
初始,我们令左边所有点的 c(u) = maxv w(u, v),也就是说最理想的情况下,每一个点都被权值最大的出边匹配。
接下来开始增广,每次只找符合要求的边。我们定义只走这些边访问到的子图为相等子图。
如果能够找到增广路就直接增广,否则,就把这次增广访问到的左边的所有点的 c − 1,右边所有点的 c + 1。
经过这样一通操作,我们发现原来的匹配每一条边仍然满足条件。同时由于访问到的点左边比右边多一个(其余的都匹配上了),所以这样会导致总的权值−1。
接下来再尝试进行增广,重复上述过程。直接这样做时间复 杂度是 O(n 3 c) 的。(进行 n 次增广,每次修改 c 次顶标,访问所有 n 2 条边)
优化
由于修改顶标的目标是让相等子图变大,因此可以每次加减 一个最小差值 delta。这样每次增广只会被修改最多 n 次顶标,时间复杂度降到 O(n 4 )。
注意到每次重新进行 dfs(深度优先搜索) 太不优秀了,可以直接进行 bfs, 每次修改完顶标之后接着上一次做。时间复杂度降到 O(n 3 )。
技巧
最小点覆盖
选取最少的点,使得每一条边的两端至少有一 个点被选中。
二分图的最小点覆盖 = 最大匹配
证明
1.由于最大匹配中的边必须被覆盖,因此匹配中的每一个点对 中都至少有一个被选中。
2.选中这些点后,如果还有边没有被覆盖,则找到一条增广路,矛盾。
最大独立集:选取最多的点,使得任意两个点不相邻。
最大独立集 = 点数-最小点覆盖
证明
1.由于最小点覆盖覆盖了所有边,因此选取剩余的点一定是一个合法的独立集。
2.若存在更大的独立集,则取补集后得到了一个更小的点覆盖,矛盾。
最小边覆盖:选取最少的边,使得每一个点都被覆盖。
最小边覆盖 = 点数-最大匹配
证明
1.先选取所有的匹配边,然后对剩下的每一个点都选择一条和 它相连的边,可以得到一个边覆盖。
2.若存在更小的边覆盖,则因为连通块数量 = 点数-边数,这 个边覆盖在原图上形成了更多的连通块,每一个连通块内选一条边,我们就得到了一个更大的匹配。
最小不相交路径覆盖:一张有向图,用最少的链覆盖所有的点,链之间不能有公共点。
将点和边分别作为二分图的两边,然后跑匹配,最小链覆盖 = 原图点数-最大匹配。
最小可相交路径覆盖:一张有向图,用最少的链覆盖所有的 点,链之间可以有公共点。
先跑一遍传递闭包,然后变成最小不相交路径覆盖。
补充
小黄鸭调试法
当你的代码出现问题的时候,
将小黄鸭想象成你的同学,
将你的代码一行一行地讲给它,
也许讲到一半你就知道问题出在哪了。
不要定义以下变量名
next,abs,x1,y1,size……
并非原创,仅是整理,请见谅
