Java多线程(6):锁与AQS(中)

您好,我是湘王,这是我的云海天,欢迎您来,欢迎您再来~
Java中的AQS(AbstractQueuedSynchronizer,抽象队列同步器)是用来实现锁及其他同步功能组件的Java底层技术基础,java.util.concurrent包下大部分类的实现都离不开它。
通过继承AQS:
1、ReentrantLock的内部类实现了公平锁和非公平锁;
2、CountDownLatch的内部类实现了发令枪;
3、ReentrantReadWriteLock的内部类实现了独享锁和共享锁;
4、Semaphore的内部类实现了公平锁和非公平锁。
AQS主要实现两大功能:独占(Exclusive,有时也叫排他)和共享(Share)。
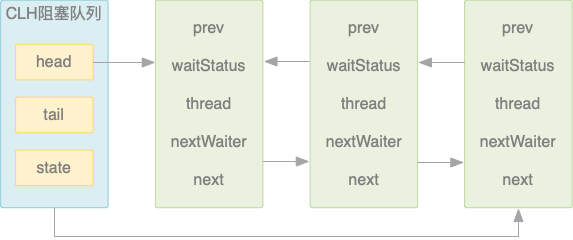
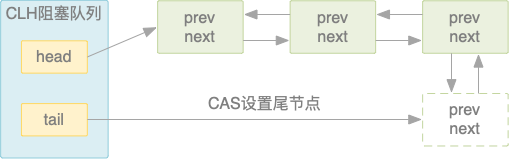
AQS在内部维护一个FIFO(First In First Out,先进先出)的CLH(Craig,Landin,and Hagersten)线程阻塞队列和一个资源同步状态的变量volatile int state。
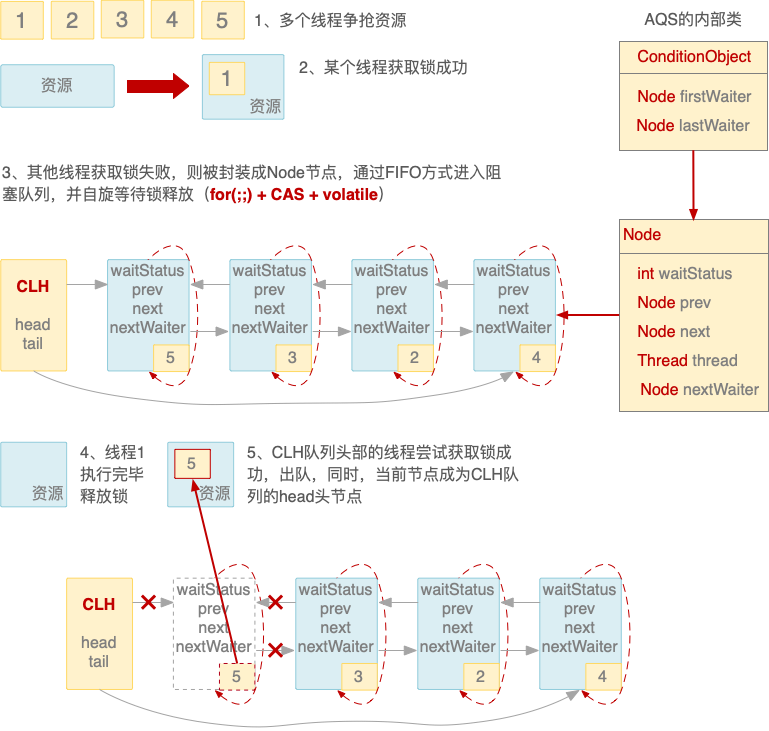
CLH是一个虚拟的双向队列,也就是不存在队列实例,仅存在节点之间的关联关系的队列。AQS是将每一条请求共享资源的线程,封装成一个CLH线程队列节点(Node),从而实现锁的分配。因此,说了一大堆,用一句简单的话来形容AQS就是:基于CLH线程阻塞队列,通过volatile变量 + CAS + 自旋方式来改变线程状态,成功则获取锁,失败则进入CLH队列。
AQS已经实现了CLH线程阻塞队列的维护,所以一般子类自定义实现AQS,要么是独占,要么是共享,也就是要么实现tryAcquire()和tryRelease()等系列方法,要么实现tryAcquireShared()和tryReleaseShared()等系列方法。
CLH队列由多个node节点组成,而且大量使用“CAS自旋volatile变量”这种经典代码:
CLH队列的结构为:
给CLH设置首节点:
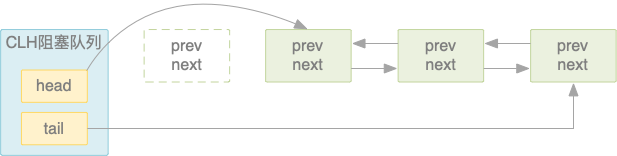
给CLH设置尾节点:
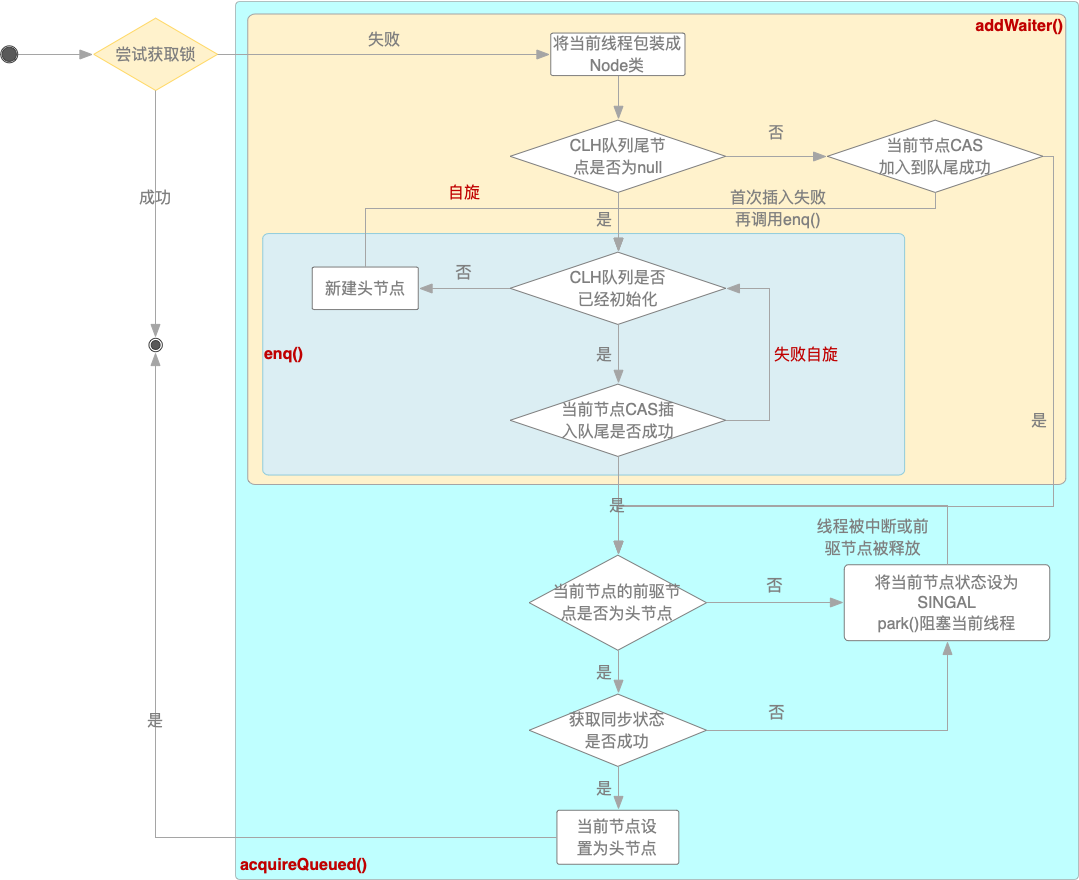
整个AQS的流程如图:
AQS特别复杂,如果想把多线程搞透的,就需要深入研究每个方法的流程,拿acquire(int)方法的执行流程为例:
我把AQS的源码做了较为详细的注释,可以结合注释看看。例如:
/**
* Provides a framework for implementing blocking locks and related
* synchronizers (semaphores, events, etc) that rely on first-in-first-out
* (FIFO) wait queues. 提供了一个实现阻塞锁和依赖FIFO的等待队列的相关的同步器(信号灯、事件等)框架
*
* This class is designed to be a useful basis for most kinds of synchronizers
* that rely on a single atomic {@code int} value to represent state.
* 这个类对于大多数使用一个单独原子类的int值来表示状态的同步器很有用
*
* Subclasses must define the protected methods that change this state, and
* which define what that state means in terms of this object being acquired or
* released. 子类必须定义protected方法来改变这个状态值,并且定义状态值是获取还是释放对象
*
* Given these, the other methods in this class carry out all queuing and
* blocking mechanics. 鉴于此,这个类中的其他方法实现了所有排队和阻塞的机制
*
* Subclasses can maintain other state fields, but only the atomically updated
* {@code int} value manipulated using methods {@link #getState},
* {@link #setState} and {@link #compareAndSetState} is tracked with respect to
* synchronization. 子类可以维护其他的状态值字段,但只有getState、setState和compareAndSetState
* 方法是通过原子更新来实现同步的
*
* <p>
* Subclasses should be defined as non-public internal helper classes that are
* used to implement the synchronization properties of their enclosing class.
* 子类应该定义成非public的内部helper工具类,用于实现其封闭类的同步属性
*
* Class {@code AbstractQueuedSynchronizer} does not implement any
* synchronization interface. AbstractQueuedSynchronizer类没有实现任何同步接口
*
* Instead it defines methods such as {@link #acquireInterruptibly} that can be
* invoked as appropriate by concrete locks and related synchronizers to
* implement their public methods.
* 取而代之的是,它定义了像acquireInterruptibly这样的方法,通过调用恰当的具体 锁和相关同步器方法,以便实现他们自己的公共方法
*
* <p>
* This class supports either or both a default <em>exclusive</em> mode and a
* <em>shared</em> mode. 这个类既支持默认的独占模式,也支持共享模式,也支持两种模式一起实现
*
* When acquired in exclusive mode, attempted acquires by other threads cannot
* succeed. 当在独占模式获取到锁时,其他线程再尝试获取锁会失败
*
* Shared mode acquires by multiple threads may (but need not) succeed.
* 共享模式,多个线程都能成功获取到锁
*
* This class does not understand these differences except in the mechanical
* sense that when a shared mode acquire succeeds, the next waiting thread (if
* one exists) must also determine whether it can acquire as well.
* 这个类不会理解机制的不同,共享模式中的一个线程获取锁成功了,下一个线程 (如果存在)仍然会去确定它自己是否也可以获取
*
* Threads waiting in the different modes share the same FIFO queue.
* 线程虽在不同的模式中,却都在等待共享相同的FIFO队列
*
* Usually, implementation subclasses support only one of these modes, but both
* can come into play for example in a {@link ReadWriteLock}.
* 通常,子类只需要实现这两种模式中的一种,但也能两种都实现,例如ReadWriteLock
*
* Subclasses that support only exclusive or only shared modes need not define
* the methods supporting the unused mode. 仅支持一种模式的子类,不必定义另一种模式下的方法
*
* <p>
* This class defines a nested {@link ConditionObject} class that can be used as
* a {@link Condition} implementation by subclasses supporting exclusive mode
* for which method {@link#isHeldExclusively} reports whether synchronization is
* exclusively held with respect to the current thread, method {@link #release}
* invoked with the current {@link #getState} value fully releases this object,
* and {@link #acquire}, given this saved state value, eventually restores this
* object to its previous acquired state.
* 这个类定义了一个嵌套的ConditionObject类,该类可以被支持独占模式的子类用作
* Condition实现,为此,isHeldExclusively()报告当前线程是否持续保持同步,
* release方法通过调用getState来完全释放当前对象,并且将当前的资源状态 再保存到state中,最后会将此对象恢复为先前的获取状态
*
* No {@code AbstractQueuedSynchronizer} method otherwise creates such a
* condition, so if this constraint cannot be met, do not use it.
* 没有AbstractQueuedSynchronizer方法去创建condition,因此如果不能满足 这个约束,就不要使用它
*
* The behavior of {@link ConditionObject} depends of course on the semantics of
* its synchronizer implementation. ConditionObject的行为依赖于其同步器实现的语义
*
* <p>
* This class provides inspection, instrumentation, and monitoring methods for
* the internal queue, as well as similar methods for condition objects.
* 这个类提供检查、追踪和监控内部队列的方法,类似于condition对象的方法
*
* These can be exported as desired into classes using an
* {@code AbstractQueuedSynchronizer} for their synchronization mechanics.
* 可以根据需要使用AbstractQueuedSynchronizer,将它们导入到类中以实现其同步机制
*
* <p>
* Serialization of this class stores only the underlying atomic integer
* maintaining state, so deserialized objects have empty thread queues.
* 这个类仅序列化state的原子值,因此反序列化出来的对象中的线程队列是空的
*
* Typical subclasses requiring serializability will define a {@code readObject}
* method that restores this to a known initial state upon deserialization.
* 需要序列化的子类可以在反序列化的时候定义一个readObject方法来恢复已知的初始状态
*
*
* <h3>Usage</h3> 使用
*
* <p>
* To use this class as the basis of a synchronizer, redefine the following
* methods, as applicable, by inspecting and/or modifying the synchronization
* state using {@link #getState}, {@link #setState} and/or
* {@link #compareAndSetState}: 使用这个类作为同步器锁,需要重新定义以下方法:
*
* <ul>
* <li>{@link #tryAcquire}
* <li>{@link #tryRelease}
* <li>{@link #tryAcquireShared}
* <li>{@link #tryReleaseShared}
* <li>{@link #isHeldExclusively}
* </ul>
*
* Each of these methods by default throws
* {@link UnsupportedOperationException}.
* 这些方法默认抛出UnsupportedOperationException异常
*
* Implementations of these methods must be internally thread-safe, and should
* in general be short and not block. 这些方法的实现必须在内部是线程安全的,而且通常都很简短,没有阻塞
*
* Defining these methods is the <em>only</em> supported means of using this
* class. 定义这些方法是使用这个类唯一可行的方式
*
* All other methods are declared {@code final} because they cannot be
* independently varied. 所有其他的方法都被声明为final,因为他们无法独自变化
*
* <p>
* You may also find the inherited methods from
* {@link AbstractOwnableSynchronizer} useful to keep track of the thread owning
* an exclusive synchronizer.
* 你可能也发现了继承自AbstractOwnableSynchronizer的方法对于跟踪拥有独占同步器的线程很有用
*
* You are encouraged to use them -- this enables monitoring and diagnostic
* tools to assist users in determining which threads hold locks.
* 鼓励你使用它们——这使得监控和诊断工具能够帮助用户确定那些线程持有锁
*
* <p>
* Even though this class is based on an internal FIFO queue, it does not
* automatically enforce FIFO acquisition policies.
* 即使这个类是基于一个内部的FIFO队列,它也不会自动执行FIFO获得策略
*
* The core of exclusive synchronization takes the form: 独占锁的核心采用以下形式:
*
* <pre>
* Acquire方法:
* while (!tryAcquire(arg)) {
* <em>enqueue thread if it is not already queued</em>;
* 使线程入队,如果它还没有在队列中的话
* <em>possibly block current thread</em>;
* 可能会阻塞当前线程
* }
*
* Release方法:
* if (tryRelease(arg))
* <em>unblock the first queued thread</em>;
* 解锁队列中的第一个线程
* </pre>
*
* (Shared mode is similar but may involve cascading signals.) 共享模式类似,但可能涉及级联信号
*
* <p id="barging">
* Because checks in acquire are invoked before enqueuing, a newly acquiring
* thread may <em>barge</em> ahead of others that are blocked and queued.
* 因为进入队列之前检查锁的获取,因此一个新的线程可能会插入其他阻塞或排队的线程之前
*
* However, you can, if desired, define {@code tryAcquire} and/or
* {@code tryAcquireShared} to disable barging by internally invoking one or
* more of the inspection methods, thereby providing a <em>fair</em> FIFO
* acquisition order. 但如果你愿意的话,可以定义tryAcquire和/或tryAcquireShared方法禁止插队,从而提供
* 一个公平的获取顺序
*
* In particular, most fair synchronizers can define {@code tryAcquire} to
* return {@code false} if {@link #hasQueuedPredecessors} (a method specifically
* designed to be used by fair synchronizers) returns {@code true}.
* 尤其是,如果hasQueuedPredecessors(专用于公平锁的方法)返回true,大多数公平锁 可以定义tryAcquire方法返回false
*
* Other variations are possible. 其他变化也是可能的
*
* <p>
* Throughput and scalability are generally highest for the default barging
* (also known as <em>greedy</em>, <em>renouncement</em>, and
* <em>convoy-avoidance</em>) strategy.
* 对于默认插入(也称为greedy,renouncement和convoy-avoidance)策略, 吞吐量和可扩展性通常是最高的
*
* While this is not guaranteed to be fair or starvation-free, earlier queued
* threads are allowed to recontend before later queued threads, and each
* recontention has an unbiased chance to succeed against incoming threads.
* 尽管这不能保证公平,也不能保证没有饥饿,但是可以让较早排队的线程在较 晚排队的线程之前进行重新竞争
*
* Also, while acquires do not spin in the usual sense, they may perform
* multiple invocations of {@code tryAcquire} interspersed with other
* computations before blocking.
* 同样,尽管获得锁通常不会自旋,但它们在阻塞之前,可以执行多个对tryAcquire的调用与其他阻塞前的计算
*
* This gives most of the benefits of spins when exclusive synchronization is
* only briefly held, without most of the liabilities when it isn"t.
* 这提供了自旋的大部分好处,而在不进行排他同步时,也不会带来很多负担
*
* If so desired, you can augment this by preceding calls to acquire methods
* with "fast-path" checks, possibly prechecking {@link #hasContended} and/or
* {@link #hasQueuedThreads} to only do so if the synchronizer is likely not to
* be contended. 如果需要,你可以通过在调用之前对获取方法进行“快速路径”检查来增强此功能,
* 可能会预先检查hasContended和/或hasQueuedThreads
*
* <p>
* This class provides an efficient and scalable basis for synchronization in
* part by specializing its range of use to synchronizers that can rely on
* {@code int} state, acquire, and release parameters, and an internal FIFO wait
* queue. 此类为同步提供了有效且可扩展的基础,部分原因是依赖于使用state,获取和释放参数 以及内部FIFO等待队列的同步器
*
* When this does not suffice, you can build synchronizers from a lower level
* using {@link java.util.concurrent.atomic atomic} classes, your own custom
* {@link java.util.Queue} classes, and {@link LockSupport} blocking support.
* 如果这不够,你可以使用原子类、实现Queue接口和LockSupport提供低级别的阻塞支持
*
* <h3>Usage Examples</h3> 使用示例
*
* <p>
* Here is a non-reentrant mutual exclusion lock class that uses the value zero
* to represent the unlocked state, and one to represent the locked state.
* 这是一个非重入互斥独占锁类,使用0表示非锁定状态,1表示锁定状态
*
* While a non-reentrant lock does not strictly require recording of the current
* owner thread, this class does so anyway to make usage easier to monitor.
* 而非重入锁并不严格要求记录当前所有者线程,无论如何,这样做是为了更易于使用
*
* It also supports conditions and exposes one of the instrumentation methods:
* 它也支持conditions并公开了一种检测方法:
*
* <pre>
* {@code
* class Mutex implements Lock, java.io.Serializable {
*
* // Our internal helper class
* // 内部helper类
* private static class Sync extends AbstractQueuedSynchronizer {
* // Reports whether in locked state
* // 是否持有锁
* protected boolean isHeldExclusively() {
* return getState() == 1;
* }
*
* // Acquires the lock if state is zero
* // 如果state是0就获得锁
* public boolean tryAcquire(int acquires) {
* assert acquires == 1; // Otherwise unused 断言acquires=1,否则退出
* if (compareAndSetState(0, 1)) {
* setExclusiveOwnerThread(Thread.currentThread());
* return true;
* }
* return false;
* }
*
* // Releases the lock by setting state to zero
* // 通过设置state=0来释放锁
* protected boolean tryRelease(int releases) {
* assert releases == 1; // Otherwise unused 断言acquires=1,否则退出
* if (getState() == 0) throw new IllegalMonitorStateException();
* setExclusiveOwnerThread(null);
* setState(0);
* return true;
* }
*
* // Provides a Condition
* Condition newCondition() {
* return new ConditionObject();
* }
*
* // Deserializes properly
* // 反序列化
* private void readObject(ObjectInputStream s)
* throws IOException, ClassNotFoundException {
* s.defaultReadObject();
* setState(0); // reset to unlocked state
* }
* }
*
* // The sync object does all the hard work. We just forward to it.
* // 同步对象完成了所有困难的工作,我们只需要利用它实现下面的方法
*
* private final Sync sync = new Sync();
*
* public void lock() { sync.acquire(1); }
* public boolean tryLock() { return sync.tryAcquire(1); }
* public void unlock() { sync.release(1); }
* public Condition newCondition() { return sync.newCondition(); }
* public boolean isLocked() { return sync.isHeldExclusively(); }
* public boolean hasQueuedThreads() { return sync.hasQueuedThreads(); }
* public void lockInterruptibly() throws InterruptedException {
* sync.acquireInterruptibly(1);
* }
* public boolean tryLock(long timeout, TimeUnit unit) throws InterruptedException {
* return sync.tryAcquireNanos(1, unit.toNanos(timeout));
* }
* }}
* </pre>
*
* <p>
* Here is a latch class that is like a
* {@link java.util.concurrent.CountDownLatch CountDownLatch} except that it
* only requires a single {@code signal} to fire.
* 这是一个和CountDownLatch类很像的latch类,除了它仅仅需要一个获取信号启动外
*
* Because a latch is non-exclusive, it uses the {@code shared} acquire and
* release methods. 因为latch类是一个非独占锁,它使用共享的获取和释放方法
*
* <pre>
* {
* @code
* class BooleanLatch {
*
* private static class Sync extends AbstractQueuedSynchronizer {
* boolean isSignalled() {
* return getState() != 0;
* }
*
* protected int tryAcquireShared(int ignore) {
* return isSignalled() ? 1 : -1;
* }
*
* protected boolean tryReleaseShared(int ignore) {
* setState(1);
* return true;
* }
* }
*
* private final Sync sync = new Sync();
*
* public boolean isSignalled() {
* return sync.isSignalled();
* }
*
* public void signal() {
* sync.releaseShared(1);
* }
*
* public void await() throws InterruptedException {
* sync.acquireSharedInterruptibly(1);
* }
* }
* }
* </pre>
*
* @since 1.5
* @author Doug Lea
*/
public abstract class AbstractQueuedSynchronizer extends AbstractOwnableSynchronizer implements java.io.Serializable {
private static final long serialVersionUID = 7373984972572414691L;
/**
* Creates a new {@code AbstractQueuedSynchronizer} instance with initial
* synchronization state of zero.
*/
/**
* 用0初始化state同步状态,创建一个新的AbstractQueuedSynchronizer实例
*/
protected AbstractQueuedSynchronizer() {
}
/**
* Wait queue node class. 等待队列的Node类
*
* <p>
* The wait queue is a variant of a "CLH" (Craig, Landin, and Hagersten) lock
* queue. 等待队列是CLH锁队列的变体
*
* CLH locks are normally used for spinlocks. CLH锁通常用于自旋锁
*
* We instead use them for blocking synchronizers, but use the same basic tactic
* of holding some of the control information about a thread in the predecessor
* of its node. 我们将用他们用于阻塞同步器,但使用相同的基本策略, 将有关线程的某些控制信息保存在其节点的前继节点中
*
* A "status" field in each node keeps track of whether a thread should block.
* 每个节点中的“status”字段都保持线程是否应该阻塞的状态
*
* A node is signalled when its predecessor releases. 当节点的前继释放时,会给当前节点发信号
*
* Each node of the queue otherwise serves as a specific-notification-style
* monitor holding a single waiting thread. The status field does NOT control
* whether threads are granted locks etc though. A thread may try to acquire if
* it is first in the queue. But being first does not guarantee success; it only
* gives the right to contend. So the currently released contender thread may
* need to rewait.
*
* <p>
* To enqueue into a CLH lock, you atomically splice it in as new tail. To
* dequeue, you just set the head field.
*
* <pre>
* +------+ prev +-----+ +-----+
* head | | <---- | | <---- | | tail
* +------+ +-----+ +-----+
* </pre>
*
* <p>
* Insertion into a CLH queue requires only a single atomic operation on "tail",
* so there is a simple atomic point of demarcation from unqueued to queued.
* Similarly, dequeuing involves only updating the "head". However, it takes a
* bit more work for nodes to determine who their successors are, in part to
* deal with possible cancellation due to timeouts and interrupts.
* 插入到CLH队列中只需要对tail执行一次原子操作,因此存在一个简单的原子分界点,即从未排队到排队
* 同样,出队仅涉及更新head。但是,节点需要花费更多的精力来确定其后继者是谁,
* 部分原因是要处理由于超时和中断而可能导致的取消
*
* <p>
* The "prev" links (not used in original CLH locks), are mainly needed to
* handle cancellation. If a node is cancelled, its successor is (normally)
* relinked to a non-cancelled predecessor. For explanation of similar mechanics
* in the case of spin locks, see the papers by Scott and Scherer at
* http://www.cs.rochester.edu/u/scott/synchronization/
*
* <p>
* We also use "next" links to implement blocking mechanics. The thread id for
* each node is kept in its own node, so a predecessor signals the next node to
* wake up by traversing next link to determine which thread it is.
* Determination of successor must avoid races with newly queued nodes to set
* the "next" fields of their predecessors. This is solved when necessary by
* checking backwards from the atomically updated "tail" when a node"s successor
* appears to be null. (Or, said differently, the next-links are an optimization
* so that we don"t usually need a backward scan.)
*
* <p>
* Cancellation introduces some conservatism to the basic algorithms. Since we
* must poll for cancellation of other nodes, we can miss noticing whether a
* cancelled node is ahead or behind us. This is dealt with by always unparking
* successors upon cancellation, allowing them to stabilize on a new
* predecessor, unless we can identify an uncancelled predecessor who will carry
* this responsibility.
*
* <p>
* CLH queues need a dummy header node to get started. But we don"t create them
* on construction, because it would be wasted effort if there is never
* contention. Instead, the node is constructed and head and tail pointers are
* set upon first contention.
*
* <p>
* Threads waiting on Conditions use the same nodes, but use an additional link.
* Conditions only need to link nodes in simple (non-concurrent) linked queues
* because they are only accessed when exclusively held. Upon await, a node is
* inserted into a condition queue. Upon signal, the node is transferred to the
* main queue. A special value of status field is used to mark which queue a
* node is on.
*
* <p>
* Thanks go to Dave Dice, Mark Moir, Victor Luchangco, Bill Scherer and Michael
* Scott, along with members of JSR-166 expert group, for helpful ideas,
* discussions, and critiques on the design of this class.
*/
static final class Node {
/** Marker to indicate a node is waiting in shared mode */
static final Node SHARED = new Node();
/** Marker to indicate a node is waiting in exclusive mode */
static final Node EXCLUSIVE = null;
/** waitStatus value to indicate thread has cancelled */
static final int CANCELLED = 1;
/** waitStatus value to indicate successor"s thread needs unparking */
static final int SIGNAL = -1;
/** waitStatus value to indicate thread is waiting on condition */
static final int CONDITION = -2;
/**
* waitStatus value to indicate the next acquireShared should unconditionally
* propagate
*/
static final int PROPAGATE = -3;
/**
* Status field, taking on only the values:
*
* SIGNAL: The successor of this node is (or will soon be) blocked (via park),
* so the current node must unpark its successor when it releases or cancels.
* To avoid races, acquire methods must first indicate they need a signal,
* then retry the atomic acquire, and then, on failure, block.
* 值为-1,表示当前节点的的后继节点将要或者已经被阻塞,在当前节点释放的时候需要unpark(唤醒)后继节点
*
* CANCELLED: This node is cancelled due to timeout or interrupt. Nodes never
* leave this state. In particular, a thread with cancelled node never again blocks.
* 值为1,表示当前节点被取消
*
* CONDITION: This node is currently on a condition queue. It will not be used
* as a sync queue node until transferred, at which time the status will be set to 0.
* (Use of this value here has nothing to do with the other uses of the field,
* but simplifies mechanics.)
* 值为-2,表示当前节点在等待condition,即在condition队列中
*
* PROPAGATE: A releaseShared should be propagated to other nodes. This is set
* (for head node only) in doReleaseShared to ensure propagation continues, even
* if other operations have since intervened. 0: None of the above
* 值为-3,表示releaseShared需要被传播给后续节点(仅在共享模式下使用)
*
* The values are arranged numerically to simplify use. Non-negative values mean
* that a node doesn"t need to signal. So, most code doesn"t need to check for
* particular values, just for sign.
*
* The field is initialized to 0 for normal sync nodes, and CONDITION for
* condition nodes. It is modified using CAS (or when possible, unconditional
* volatile writes).
* 无状态,表示当前节点在队列中等待获取锁
*
*/
volatile int waitStatus;
/**
* Link to predecessor node that current node/thread relies on for checking
* waitStatus. Assigned during enqueuing, and nulled out (for sake of GC) only
* upon dequeuing. Also, upon cancellation of a predecessor, we short-circuit
* while finding a non-cancelled one, which will always exist because the head
* node is never cancelled: A node becomes head only as a result of successful
* acquire. A cancelled thread never succeeds in acquiring, and a thread only
* cancels itself, not any other node.
*/
volatile Node prev;
/**
* Link to the successor node that the current node/thread unparks upon release.
* Assigned during enqueuing, adjusted when bypassing cancelled predecessors,
* and nulled out (for sake of GC) when dequeued. The enq operation does not
* assign next field of a predecessor until after attachment, so seeing a null
* next field does not necessarily mean that node is at end of queue. However,
* if a next field appears to be null, we can scan prev"s from the tail to
* double-check. The next field of cancelled nodes is set to point to the node
* itself instead of null, to make life easier for isOnSyncQueue.
*/
volatile Node next;
/**
* The thread that enqueued this node. Initialized on construction and nulled
* out after use.
*/
volatile Thread thread;
/**
* Link to next node waiting on condition, or the special value SHARED.
* Because condition queues are accessed only when holding in exclusive mode, we just
* need a simple linked queue to hold nodes while they are waiting on
* conditions. They are then transferred to the queue to re-acquire. And because
* conditions can only be exclusive, we save a field by using special value to
* indicate shared mode.
*/
Node nextWaiter;
/**
* Returns true if node is waiting in shared mode.
*/
final boolean isShared() {
return nextWaiter == SHARED;
}
/**
* Returns previous node, or throws NullPointerException if null. Use when
* predecessor cannot be null. The null check could be elided, but is present to
* help the VM.
* 返回前继节点,如果为空则抛出异常
*
* @return the predecessor of this node
*/
final Node predecessor() throws NullPointerException {
Node p = prev;
if (p == null) {
throw new NullPointerException();
} else {
return p;
}
}
Node() { // Used to establish initial head or SHARED marker
}
Node(Thread thread, Node mode) { // Used by addWaiter
this.nextWaiter = mode;
this.thread = thread;
}
Node(Thread thread, int waitStatus) { // Used by Condition
this.waitStatus = waitStatus;
this.thread = thread;
}
}
/**
* Head of the wait queue, lazily initialized. Except for initialization, it is
* modified only via method setHead. Note: If head exists, its waitStatus is
* guaranteed not to be CANCELLED. 等待队列头部节点,懒加载,它仅仅通过setHead方法修改
* 注意:如果头部节点存在,它的等待状态不保证会是CANCELLED
*/
private transient volatile Node head;
/**
* Tail of the wait queue, lazily initialized. Modified only via method enq to
* add new wait node. 等待队列的队尾节点,懒加载,只能通过enq方法加载新节点到队尾
*/
private transient volatile Node tail;
/**
* The synchronization state. 同步状态
* 该变量对不同的子类实现具有不同的意义
* 对ReentrantLock来说,它表示加锁的状态:
* 无锁时state=0,有锁时state>0
* 第一次加锁时,将state+1
* 而对于CountDownLatch来说,它是初始化时子线程的数量
*
*/
private volatile int state;
/**
* Returns the current value of synchronization state. This operation has memory
* semantics of a {@code volatile} read.
*
* @return current state value
*/
protected final int getState() {
return state;
}
/**
* Sets the value of synchronization state. This operation has memory semantics
* of a {@code volatile} write.
*
* @param newState the new state value
*/
protected final void setState(int newState) {
state = newState;
}
/**
* Atomically sets synchronization state to the given updated value if the
* current state value equals the expected value. This operation has memory
* semantics of a {@code volatile} read and write. 以原子方式设置同步状态为指定的值
*
* @param expect the expected value
* @param update the new value
* @return {@code true} if successful. False return indicates that the actual
* value was not equal to the expected value.
*/
protected final boolean compareAndSetState(int expect, int update) {
// See below for intrinsics setup to support this
return unsafe.compareAndSwapInt(this, stateOffset, expect, update);
}
// Queuing utilities
/**
* The number of nanoseconds for which it is faster to spin rather than to use
* timed park. A rough estimate suffices to improve responsiveness with very
* short timeouts. 自旋超时时间,使用比park更快的纳秒,足以在非常短的时间内提高响应能力,默认值1000纳秒
*/
static final long spinForTimeoutThreshold = 1000L;
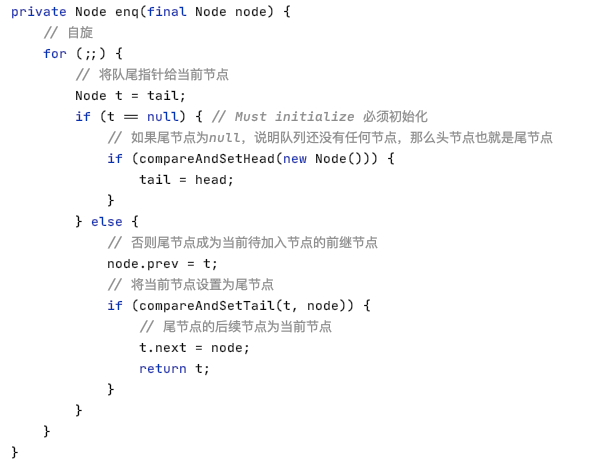
/**
* Inserts node into queue, initializing if necessary. See picture above.
* 插入节点到队尾,如果有必要的话初始化
*
* @param node the node to insert
* @return node"s predecessor
*/
private Node enq(final Node node) {
// 自旋
for (;;) {
// 将队尾指针给当前节点
Node t = tail;
if (t == null) { // Must initialize 必须初始化
// 如果尾节点为null,说明队列还没有任何节点,那么头节点也就是尾节点
if (compareAndSetHead(new Node())) {
tail = head;
}
} else {
// 否则尾节点成为当前待加入节点的前继节点
node.prev = t;
// 将当前节点设置为尾节点
if (compareAndSetTail(t, node)) {
// 尾节点的后续节点为当前节点
t.next = node;
return t;
}
}
}
}
/**
* Creates and enqueues node for current thread and given mode.
* 按给定模式将当前线程包装成一个入队的节点
*
* @param mode Node.EXCLUSIVE for exclusive, Node.SHARED for shared
* @return the new node
*/
private Node addWaiter(Node mode) {
// 将当前线程包装成节点
Node node = new Node(Thread.currentThread(), mode);
// Try the fast path of enq; backup to full enq on failure
// 尝试快速入队
Node pred = tail;
// 尾节点是否为null
if (pred != null) {
// 将尾节点设置为当前节点的前继节点
node.prev = pred;
// 将当前节点设置为尾节点
if (compareAndSetTail(pred, node)) {
// 尾节点的后续节点为当前节点
pred.next = node;
return node;
}
}
// 尾节点为null,则执行enq
enq(node);
// 返回当前节点
return node;
}
/**
* Sets head of queue to be node, thus dequeuing. Called only by acquire
* methods. Also nulls out unused fields for sake of GC and to suppress
* unnecessary signals and traversals.
* 将节点设置为队列头,从而让持有锁的节点出列,仅由acquire调用
* 为了GC和抑制不必要的信号和遍历,也会清空未使用的字段
*
* @param node the node
*/
private void setHead(Node node) {
// 将节点设置为队列头
head = node;
// 头节点没有线程
node.thread = null;
// 头节点没有前继节点
node.prev = null;
}
/**
* Wakes up node"s successor, if one exists.
* 唤醒节点的后续节点
*
* @param node the node
*/
private void unparkSuccessor(Node node) {
/*
* If status is negative (i.e., possibly needing signal) try to clear in
* anticipation of signalling. It is OK if this fails or if status is changed by
* waiting thread.
* 如果状态值为负,就尝试清除预期信号值
* 如果失败或状态由等待线程更改,则OK
*/
int ws = node.waitStatus;
if (ws < 0) {
compareAndSetWaitStatus(node, ws, 0);
}
/*
* Thread to unpark is held in successor, which is normally just the next node.
* But if cancelled or apparently null, traverse backwards from tail to find the
* actual non-cancelled successor.
*/
Node s = node.next;
if (s == null || s.waitStatus > 0) {
s = null;
for (Node t = tail; t != null && t != node; t = t.prev) {
if (t.waitStatus <= 0) {
s = t;
}
}
}
if (s != null) {
LockSupport.unpark(s.thread);
}
}
/**
* Release action for shared mode -- signals successor and ensures propagation.
* (Note: For exclusive mode, release just amounts to calling unparkSuccessor of
* head if it needs signal.)
* 共享模式下的释放行为——发出后续信号并确保传播
* (注意:对于独占模式,释放只是在需要信号时调用head的unparkSuccessor方法)
*
*/
private void doReleaseShared() {
/*
* Ensure that a release propagates, even if there are other in-progress
* acquires/releases. This proceeds in the usual way of trying to
* unparkSuccessor of head if it needs signal. But if it does not, status is set
* to PROPAGATE to ensure that upon release, propagation continues.
* Additionally, we must loop in case a new node is added while we are doing
* this. Also, unlike other uses of unparkSuccessor, we need to know if CAS to
* reset status fails, if so rechecking.
*/
for (;;) {
Node h = head;
if (h != null && h != tail) {
int ws = h.waitStatus;
if (ws == Node.SIGNAL) {
if (!compareAndSetWaitStatus(h, Node.SIGNAL, 0)) {
continue; // loop to recheck cases
}
unparkSuccessor(h);
} else if (ws == 0 && !compareAndSetWaitStatus(h, 0, Node.PROPAGATE)) {
continue; // loop on failed CAS
}
}
if (h == head) {
// loop if head changed
break;
}
}
}
/**
* Sets head of queue, and checks if successor may be waiting in shared mode, if
* so propagating if either propagate > 0 or PROPAGATE status was set.
*
* @param node the node
* @param propagate the return value from a tryAcquireShared
*/
private void setHeadAndPropagate(Node node, int propagate) {
Node h = head; // Record old head for check below
setHead(node);
/*
* Try to signal next queued node if: Propagation was indicated by caller, or
* was recorded (as h.waitStatus either before or after setHead) by a previous
* operation (note: this uses sign-check of waitStatus because PROPAGATE status
* may transition to SIGNAL.) and The next node is waiting in shared mode, or we
* don"t know, because it appears null
*
* The conservatism in both of these checks may cause unnecessary wake-ups, but
* only when there are multiple racing acquires/releases, so most need signals
* now or soon anyway.
*/
if (propagate > 0 || h == null || h.waitStatus < 0 || (h = head) == null || h.waitStatus < 0) {
Node s = node.next;
if (s == null || s.isShared()) {
doReleaseShared();
}
}
}
// Utilities for various versions of acquire
/**
* Cancels an ongoing attempt to acquire.
* 取消一个不断尝试获取锁的线程节点
*
* @param node the node
*/
private void cancelAcquire(Node node) {
// Ignore if node doesn"t exist
if (node == null) {
return;
}
node.thread = null;
// Skip cancelled predecessors
Node pred = node.prev;
while (pred.waitStatus > 0) {
node.prev = pred = pred.prev;
}
// predNext is the apparent node to unsplice. CASes below will
// fail if not, in which case, we lost race vs another cancel
// or signal, so no further action is necessary.
Node predNext = pred.next;
// Can use unconditional write instead of CAS here.
// After this atomic step, other Nodes can skip past us.
// Before, we are free of interference from other threads.
node.waitStatus = Node.CANCELLED;
// If we are the tail, remove ourselves.
if (node == tail && compareAndSetTail(node, pred)) {
compareAndSetNext(pred, predNext, null);
} else {
// If successor needs signal, try to set pred"s next-link
// so it will get one. Otherwise wake it up to propagate.
int ws;
if (pred != head &&
((ws = pred.waitStatus) == Node.SIGNAL || (ws <= 0 && compareAndSetWaitStatus(pred, ws, Node.SIGNAL))) &&
pred.thread != null) {
Node next = node.next;
if (next != null && next.waitStatus <= 0) {
compareAndSetNext(pred, predNext, next);
}
} else {
unparkSuccessor(node);
}
node.next = node; // help GC
}
}
/**
* Checks and updates status for a node that failed to acquire. Returns true if
* thread should block. This is the main signal control in all acquire loops.
* Requires that pred == node.prev.
* 节点获取锁失败时检查并且更新状态值,如果线程应该阻塞返回true
* 在所有获取锁的循环中这是主要的信号控制
*
* @param pred node"s predecessor holding status
* @param node the node
* @return {@code true} if thread should block
*/
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {
int ws = pred.waitStatus;
if (ws == Node.SIGNAL) {
/*
* This node has already set status asking a release to signal it, so it can
* safely park.
*/
return true;
}
if (ws > 0) {
/*
* Predecessor was cancelled. Skip over predecessors and indicate retry.
*/
do {
node.prev = pred = pred.prev;
} while (pred.waitStatus > 0);
pred.next = node;
} else {
/*
* waitStatus must be 0 or PROPAGATE. Indicate that we need a signal, but don"t
* park yet. Caller will need to retry to make sure it cannot acquire before
* parking.
*/
compareAndSetWaitStatus(pred, ws, Node.SIGNAL);
}
return false;
}
/**
* Convenience method to interrupt current thread.
* 中断当前线程的快捷方法
*/
static void selfInterrupt() {
Thread.currentThread().interrupt();
}
/**
* Convenience method to park and then check if interrupted
*
* @return {@code true} if interrupted
*/
private final boolean parkAndCheckInterrupt() {
LockSupport.park(this);
return Thread.interrupted();
}
/*
* Various flavors of acquire, varying in exclusive/shared and control modes.
* Each is mostly the same, but annoyingly different. Only a little bit of
* factoring is possible due to interactions of exception mechanics (including
* ensuring that we cancel if tryAcquire throws exception) and other control, at
* least not without hurting performance too much.
* 在独占和共享模式中,获取锁有多种方式,大多数都相同
* 由于异常机制(包括确保在tryAcquire抛出异常时取消)和其他控件的交互,
* 性能可能会受一点影响,但至少不会造成太大的损害
*/
/**
* Acquires in exclusive uninterruptible mode for thread already in queue. Used
* by condition wait methods as well as acquire.
* 以独占不中断模式获取队列中已存在的线程。用于condition等待方法以及获取锁
*
* @param node the node
* @param arg the acquire argument
* @return {@code true} if interrupted while waiting
*/
final boolean acquireQueued(final Node node, int arg) {
boolean failed = true;
try {
boolean interrupted = false;
for (;;) {
final Node p = node.predecessor();
if (p == head && tryAcquire(arg)) {
setHead(node);
p.next = null; // help GC
failed = false;
return interrupted;
}
if (shouldParkAfterFailedAcquire(p, node) && parkAndCheckInterrupt()) {
interrupted = true;
}
}
} finally {
if (failed) {
cancelAcquire(node);
}
}
}
/**
* Acquires in exclusive interruptible mode.
* 独占中断模式获取锁
*
* @param arg the acquire argument
*/
private void doAcquireInterruptibly(int arg) throws InterruptedException {
final Node node = addWaiter(Node.EXCLUSIVE);
boolean failed = true;
try {
for (;;) {
final Node p = node.predecessor();
if (p == head && tryAcquire(arg)) {
setHead(node);
p.next = null; // help GC
failed = false;
return;
}
if (shouldParkAfterFailedAcquire(p, node) && parkAndCheckInterrupt())
throw new InterruptedException();
}
} finally {
if (failed)
cancelAcquire(node);
}
}
/**
* Acquires in exclusive timed mode.
* 独占超时模式获取锁
*
* @param arg the acquire argument
* @param nanosTimeout max wait time
* @return {@code true} if acquired
*/
private boolean doAcquireNanos(int arg, long nanosTimeout) throws InterruptedException {
if (nanosTimeout <= 0L) {
return false;
}
final long deadline = System.nanoTime() + nanosTimeout;
final Node node = addWaiter(Node.EXCLUSIVE);
boolean failed = true;
try {
for (;;) {
final Node p = node.predecessor();
if (p == head && tryAcquire(arg)) {
setHead(node);
p.next = null; // help GC
failed = false;
return true;
}
nanosTimeout = deadline - System.nanoTime();
if (nanosTimeout <= 0L) {
return false;
}
if (shouldParkAfterFailedAcquire(p, node) && nanosTimeout > spinForTimeoutThreshold) {
LockSupport.parkNanos(this, nanosTimeout);
}
if (Thread.interrupted()) {
throw new InterruptedException();
}
}
} finally {
if (failed) {
cancelAcquire(node);
}
}
}
/**
* Acquires in shared uninterruptible mode.
* 共享非中断模式获取锁
*
* @param arg the acquire argument
*/
private void doAcquireShared(int arg) {
final Node node = addWaiter(Node.SHARED);
boolean failed = true;
try {
boolean interrupted = false;
for (;;) {
final Node p = node.predecessor();
if (p == head) {
int r = tryAcquireShared(arg);
if (r >= 0) {
setHeadAndPropagate(node, r);
p.next = null; // help GC
if (interrupted) {
selfInterrupt();
}
failed = false;
return;
}
}
if (shouldParkAfterFailedAcquire(p, node) && parkAndCheckInterrupt()) {
interrupted = true;
}
}
} finally {
if (failed) {
cancelAcquire(node);
}
}
}
/**
* Acquires in shared interruptible mode.
* 共享中断模式获取锁
*
* @param arg the acquire argument
*/
private void doAcquireSharedInterruptibly(int arg) throws InterruptedException {
final Node node = addWaiter(Node.SHARED);
boolean failed = true;
try {
for (;;) {
final Node p = node.predecessor();
if (p == head) {
int r = tryAcquireShared(arg);
if (r >= 0) {
setHeadAndPropagate(node, r);
p.next = null; // help GC
failed = false;
return;
}
}
if (shouldParkAfterFailedAcquire(p, node) && parkAndCheckInterrupt()) {
throw new InterruptedException();
}
}
} finally {
if (failed) {
cancelAcquire(node);
}
}
}
/**
* Acquires in shared timed mode.
* 共享超时模式获取锁
*
* @param arg the acquire argument
* @param nanosTimeout max wait time
* @return {@code true} if acquired
*/
private boolean doAcquireSharedNanos(int arg, long nanosTimeout) throws InterruptedException {
if (nanosTimeout <= 0L) {
return false;
}
final long deadline = System.nanoTime() + nanosTimeout;
final Node node = addWaiter(Node.SHARED);
boolean failed = true;
try {
for (;;) {
final Node p = node.predecessor();
if (p == head) {
int r = tryAcquireShared(arg);
if (r >= 0) {
setHeadAndPropagate(node, r);
p.next = null; // help GC
failed = false;
return true;
}
}
nanosTimeout = deadline - System.nanoTime();
if (nanosTimeout <= 0L) {
return false;
}
if (shouldParkAfterFailedAcquire(p, node) && nanosTimeout > spinForTimeoutThreshold) {
LockSupport.parkNanos(this, nanosTimeout);
}
if (Thread.interrupted()) {
throw new InterruptedException();
}
}
} finally {
if (failed) {
cancelAcquire(node);
}
}
}
// Main exported methods
// 主要的自定义方法
/**
* Attempts to acquire in exclusive mode. This method should query if the state
* of the object permits it to be acquired in the exclusive mode, and if so to
* acquire it.
* 尝试以独占模式获取锁,此方法应该查询对象的状态state是否允许以独占模式获取锁,如果允许则获取锁
*
* <p>
* This method is always invoked by the thread performing acquire. If this
* method reports failure, the acquire method may queue the thread, if it is not
* already queued, until it is signalled by a release from some other thread.
* This can be used to implement method {@link Lock#tryLock()}.
* 此方法始终由执行获取锁的线程调用,如果获取失败,则会将线程放到CLH队列队尾(如果尚未排队),
* 直到某个其他线程发出释放信号,这可用于实现接口方法tryLock
*
* <p>
* The default implementation throws {@link UnsupportedOperationException}.
* 缺省实现是抛出UnsupportedOperationException异常
*
* @param arg the acquire argument. This value is always the one passed to an
* acquire method, or is the value saved on entry to a condition
* wait. The value is otherwise uninterpreted and can represent
* anything you like.
* 获取锁的参数,表示需要获取锁的数量
*
* @return {@code true} if successful. Upon success, this object has been acquired.
* @throws IllegalMonitorStateException
* if acquiring would place this synchronizer in an illegal state.
* This exception must be thrown in a consistent fashion for
* synchronization to work correctly.
* @throws UnsupportedOperationException
* if exclusive mode is not supported
*/
protected boolean tryAcquire(int arg) {
throw new UnsupportedOperationException();
}
/**
* Attempts to set the state to reflect a release in exclusive mode.
* 尝试将状态state设置为以独占模式释放锁
*
* <p>
* This method is always invoked by the thread performing release.
* 此方法始终由执行释放的线程调用
*
* <p>
* The default implementation throws {@link UnsupportedOperationException}.
* 缺省实现是抛出UnsupportedOperationException异常
*
* @param arg the release argument. This value is always the one passed to a
* release method, or the current state value upon entry to a
* condition wait. The value is otherwise uninterpreted and can
* represent anything you like.
* 释放锁的参数,表示需要释放锁的数量,与tryAcquire中需要获取的数量一一对应
*
* @return {@code true} if this object is now in a fully released state, so that
* any waiting threads may attempt to acquire; and {@code false}
* otherwise.
* @throws IllegalMonitorStateException
* if releasing would place this synchronizer in an illegal state.
* This exception must be thrown in a consistent fashion for
* synchronization to work correctly.
* @throws UnsupportedOperationException
* if exclusive mode is not supported
*/
protected boolean tryRelease(int arg) {
throw new UnsupportedOperationException();
}
/**
* Attempts to acquire in shared mode. This method should query if the state of
* the object permits it to be acquired in the shared mode, and if so to acquire
* it.
* 共享模式尝试获取锁
*
* <p>
* This method is always invoked by the thread performing acquire. If this
* method reports failure, the acquire method may queue the thread, if it is not
* already queued, until it is signalled by a release from some other thread.
* 此方法始终由执行获取的线程调用,如果调用失败,则会将线程放到CLH队列队尾(如果尚未排队),
* 直到某个其他线程发出释放信号
*
* <p>
* The default implementation throws {@link UnsupportedOperationException}.
* 缺省实现是抛出UnsupportedOperationException异常
*
* @param arg the acquire argument. This value is always the one passed to an
* acquire method, or is the value saved on entry to a condition
* wait. The value is otherwise uninterpreted and can represent
* anything you like.
* @return a negative value on failure; zero if acquisition in shared mode
* succeeded but no subsequent shared-mode acquire can succeed; and a
* positive value if acquisition in shared mode succeeded and subsequent
* shared-mode acquires might also succeed, in which case a subsequent
* waiting thread must check availability. (Support for three different
* return values enables this method to be used in contexts where
* acquires only sometimes act exclusively.) Upon success, this object
* has been acquired.
* @throws IllegalMonitorStateException
* if acquiring would place this synchronizer in an illegal state.
* This exception must be thrown in a consistent fashion for
* synchronization to work correctly.
* @throws UnsupportedOperationException
* if shared mode is not supported
*/
protected int tryAcquireShared(int arg) {
throw new UnsupportedOperationException();
}
/**
* Attempts to set the state to reflect a release in shared mode.
* 尝试将状态state设置为以共享模式释放锁
*
* <p>
* This method is always invoked by the thread performing release.
* 此方法始终由执行获取的线程调用
*
* <p>
* The default implementation throws {@link UnsupportedOperationException}.
* 缺省实现是抛出UnsupportedOperationException异常
*
* @param arg the release argument. This value is always the one passed to a
* release method, or the current state value upon entry to a
* condition wait. The value is otherwise uninterpreted and can
* represent anything you like.
* @return {@code true} if this release of shared mode may permit a waiting
* acquire (shared or exclusive) to succeed; and {@code false} otherwise
* @throws IllegalMonitorStateException
* if releasing would place this synchronizer in an illegal state.
* This exception must be thrown in a consistent fashion for
* synchronization to work correctly.
* @throws UnsupportedOperationException
* if shared mode is not supported
*/
protected boolean tryReleaseShared(int arg) {
throw new UnsupportedOperationException();
}
/**
* Returns {@code true} if synchronization is held exclusively with respect to
* the current (calling) thread. This method is invoked upon each call to a
* non-waiting {@link ConditionObject} method. (Waiting methods instead invoke
* {@link #release}.)
* 如果以独占方式保持与当前(调用)线程的同步,则返回true
* 每次调用非等待的ConditionObject方法时都会调用此方法(等待方法改为调用release)
*
* <p>
* The default implementation throws {@link UnsupportedOperationException}. This
* method is invoked internally only within {@link ConditionObject} methods, so
* need not be defined if conditions are not used.
* 缺省实现是抛出UnsupportedOperationException异常
* 此方法仅在ConditionObject内部调用,因此如果不使用Condition,则无需定义
*
* @return {@code true} if synchronization is held exclusively; {@code false}
* otherwise
* @throws UnsupportedOperationException if conditions are not supported
*/
protected boolean isHeldExclusively() {
throw new UnsupportedOperationException();
}
/**
* Acquires in exclusive mode, ignoring interrupts. Implemented by invoking at
* least once {@link #tryAcquire}, returning on success. Otherwise the thread is
* queued, possibly repeatedly blocking and unblocking, invoking
* {@link #tryAcquire} until success. This method can be used to implement
* method {@link Lock#lock}.
* 以独占模式获取锁,忽略中断,通过调用至少一次tryAcquire来实现,成功时返回,否则线程将排队
* 可能会反复阻塞和解除阻塞,调用tryAcquire直到成功获取锁,此方法可用于实现接口方法lock
*
* @param arg the acquire argument. This value is conveyed to
* {@link #tryAcquire} but is otherwise uninterpreted and can
* represent anything you like.
*/
public final void acquire(int arg) {
/**
* 该方法主要做了如下工作:
* 先看tryAcquire尝试获取独占锁是否成功,获取成功则返回
* 否则用addWaiter方法将当前线程封装成Node对象,并添加到队列尾部
* 自旋获取锁,并判断中断标志位
* 如果中断标志位为true,则设置中断线程,否则返回
*/
if (!tryAcquire(arg) && acquireQueued(addWaiter(Node.EXCLUSIVE), arg)) {
selfInterrupt();
}
}
/**
* Acquires in exclusive mode, aborting if interrupted. Implemented by first
* checking interrupt status, then invoking at least once {@link #tryAcquire},
* returning on success. Otherwise the thread is queued, possibly repeatedly
* blocking and unblocking, invoking {@link #tryAcquire} until success or the
* thread is interrupted. This method can be used to implement method
* {@link Lock#lockInterruptibly}.
* 独占模式获取锁,如果中断则取消
* 首先检查中断状态,然后至少调用一次tryAcquire来实现方法,在成功时返回,否则线程将进入队尾
* 可能会反复阻塞和解除阻塞,调用tryAcquire,直到成功或线程被中断
* 此方法可用于实现接口方法lockInterruptibly
*
* @param arg the acquire argument. This value is conveyed to
* {@link #tryAcquire} but is otherwise uninterpreted and can
* represent anything you like.
* @throws InterruptedException if the current thread is interrupted
*/
public final void acquireInterruptibly(int arg) throws InterruptedException {
if (Thread.interrupted()) {
throw new InterruptedException();
}
if (!tryAcquire(arg)) {
doAcquireInterruptibly(arg);
}
}
/**
* Attempts to acquire in exclusive mode, aborting if interrupted, and failing
* if the given timeout elapses. Implemented by first checking interrupt status,
* then invoking at least once {@link #tryAcquire}, returning on success.
* Otherwise, the thread is queued, possibly repeatedly blocking and unblocking,
* invoking {@link #tryAcquire} until success or the thread is interrupted or
* the timeout elapses. This method can be used to implement method
* {@link Lock#tryLock(long, TimeUnit)}.
* 尝试以独占模式获取锁,如果中断则中止,如果超时则失败
* 通过首先检查中断状态,然后至少调用一次tryAcquire来实现,在成功时返回,否则线程将进入队尾
* 可能会反复阻塞和解除阻塞,调用tryAcquire,直到成功或线程中断或超时结束
* 此方法可用于实现接口方法tryLock(long, TimeUnit)
*
* @param arg the acquire argument. This value is conveyed to
* {@link #tryAcquire} but is otherwise uninterpreted and can
* represent anything you like.
* @param nanosTimeout the maximum number of nanoseconds to wait
* @return {@code true} if acquired; {@code false} if timed out
* @throws InterruptedException if the current thread is interrupted
*/
public final boolean tryAcquireNanos(int arg, long nanosTimeout) throws InterruptedException {
if (Thread.interrupted()) {
throw new InterruptedException();
}
return tryAcquire(arg) || doAcquireNanos(arg, nanosTimeout);
}
/**
* Releases in exclusive mode. Implemented by unblocking one or more threads if
* {@link #tryRelease} returns true. This method can be used to implement method
* {@link Lock#unlock}.
* 独占模式时释放锁,通过解除一个或多个阻塞线程来实现,如果tryRelease返回true
* 此方法可用于实现接口方法unlock
*
* @param arg the release argument. This value is conveyed to
* {@link #tryRelease} but is otherwise uninterpreted and can
* represent anything you like.
* @return the value returned from {@link #tryRelease}
*/
public final boolean release(int arg) {
if (tryRelease(arg)) {
Node h = head;
if (h != null && h.waitStatus != 0) {
unparkSuccessor(h);
}
return true;
}
return false;
}
/**
* Acquires in shared mode, ignoring interrupts. Implemented by first invoking
* at least once {@link #tryAcquireShared}, returning on success. Otherwise the
* thread is queued, possibly repeatedly blocking and unblocking, invoking
* {@link #tryAcquireShared} until success.
*
* @param arg the acquire argument. This value is conveyed to
* {@link #tryAcquireShared} but is otherwise uninterpreted and can
* represent anything you like.
*/
public final void acquireShared(int arg) {
if (tryAcquireShared(arg) < 0) {
doAcquireShared(arg);
}
}
/**
* Acquires in shared mode, aborting if interrupted. Implemented by first
* checking interrupt status, then invoking at least once
* {@link #tryAcquireShared}, returning on success. Otherwise the thread is
* queued, possibly repeatedly blocking and unblocking, invoking
* {@link #tryAcquireShared} until success or the thread is interrupted.
*
* @param arg the acquire argument. This value is conveyed to
* {@link #tryAcquireShared} but is otherwise uninterpreted and can
* represent anything you like.
* @throws InterruptedException
* if the current thread is interrupted
*/
public final void acquireSharedInterruptibly(int arg) throws InterruptedException {
if (Thread.interrupted()) {
throw new InterruptedException();
}
if (tryAcquireShared(arg) < 0) {
doAcquireSharedInterruptibly(arg);
}
}
/**
* Attempts to acquire in shared mode, aborting if interrupted, and failing if
* the given timeout elapses. Implemented by first checking interrupt status,
* then invoking at least once {@link #tryAcquireShared}, returning on success.
* Otherwise, the thread is queued, possibly repeatedly blocking and unblocking,
* invoking {@link #tryAcquireShared} until success or the thread is interrupted
* or the timeout elapses.
*
* @param arg the acquire argument. This value is conveyed to
* {@link #tryAcquireShared} but is otherwise uninterpreted and can
* represent anything you like.
* @param nanosTimeout
* the maximum number of nanoseconds to wait
* @return {@code true} if acquired; {@code false} if timed out
* @throws InterruptedException
* if the current thread is interrupted
*/
public final boolean tryAcquireSharedNanos(int arg, long nanosTimeout) throws InterruptedException {
if (Thread.interrupted()) {
throw new InterruptedException();
}
return tryAcquireShared(arg) >= 0 || doAcquireSharedNanos(arg, nanosTimeout);
}
/**
* Releases in shared mode. Implemented by unblocking one or more threads if
* {@link #tryReleaseShared} returns true.
*
* @param arg the release argument. This value is conveyed to
* {@link #tryReleaseShared} but is otherwise uninterpreted and can
* represent anything you like.
* @return the value returned from {@link #tryReleaseShared}
*/
public final boolean releaseShared(int arg) {
if (tryReleaseShared(arg)) {
doReleaseShared();
return true;
}
return false;
}
// Queue inspection methods
/**
* Queries whether any threads are waiting to acquire. Note that because
* cancellations due to interrupts and timeouts may occur at any time, a
* {@code true} return does not guarantee that any other thread will ever
* acquire.
* 查询是否有线程正在等待获取锁
* 请注意,由于中断和超时导致的取消可能随时发生,因此返回true不能保证任何其他线程将获得锁
*
* <p>
* In this implementation, this operation returns in constant time.
* 在该实现中,操作以指定的时间返回
*
* @return {@code true} if there may be other threads waiting to acquire
*/
public final boolean hasQueuedThreads() {
return head != tail;
}
/**
* Queries whether any threads have ever contended to acquire this synchronizer;
* that is if an acquire method has ever blocked.
* 查询是否有任何线程曾争用获取此同步器,也就是说,是否某个获取锁方法曾被阻塞
*
* <p>
* In this implementation, this operation returns in constant time.
* 在该实现中,操作以指定的时间返回
*
* @return {@code true} if there has ever been contention
*/
public final boolean hasContended() {
return head != null;
}
/**
* Returns the first (longest-waiting) thread in the queue, or {@code null} if
* no threads are currently queued.
*
* <p>
* In this implementation, this operation normally returns in constant time, but
* may iterate upon contention if other threads are concurrently modifying the
* queue.
*
* @return the first (longest-waiting) thread in the queue, or {@code null} if
* no threads are currently queued
*/
public final Thread getFirstQueuedThread() {
// handle only fast path, else relay
return (head == tail) ? null : fullGetFirstQueuedThread();
}
/**
* Version of getFirstQueuedThread called when fastpath fails
*/
private Thread fullGetFirstQueuedThread() {
/*
* The first node is normally head.next. Try to get its thread field, ensuring
* consistent reads: If thread field is nulled out or s.prev is no longer head,
* then some other thread(s) concurrently performed setHead in between some of
* our reads. We try this twice before resorting to traversal.
*/
Node h, s;
Thread st;
if (((h = head) != null && (s = h.next) != null && s.prev == head && (st = s.thread) != null)
|| ((h = head) != null && (s = h.next) != null && s.prev == head && (st = s.thread) != null)) {
return st;
}
/*
* Head"s next field might not have been set yet, or may have been unset after
* setHead. So we must check to see if tail is actually first node. If not, we
* continue on, safely traversing from tail back to head to find first,
* guaranteeing termination.
*/
Node t = tail;
Thread firstThread = null;
while (t != null && t != head) {
Thread tt = t.thread;
if (tt != null) {
firstThread = tt;
}
t = t.prev;
}
return firstThread;
}
/**
* Returns true if the given thread is currently queued.
*
* <p>
* This implementation traverses the queue to determine presence of the given thread.
*
* @param thread the thread
* @return {@code true} if the given thread is on the queue
* @throws NullPointerException if the thread is null
*/
public final boolean isQueued(Thread thread) {
if (thread == null) {
throw new NullPointerException();
}
for (Node p = tail; p != null; p = p.prev) {
if (p.thread == thread) {
return true;
}
}
return false;
}
/**
* Returns {@code true} if the apparent first queued thread, if one exists, is
* waiting in exclusive mode. If this method returns {@code true}, and the
* current thread is attempting to acquire in shared mode (that is, this method
* is invoked from {@link #tryAcquireShared}) then it is guaranteed that the
* current thread is not the first queued thread. Used only as a heuristic in
* ReentrantReadWriteLock.
*/
final boolean apparentlyFirstQueuedIsExclusive() {
Node h, s;
return (h = head) != null && (s = h.next) != null && !s.isShared() && s.thread != null;
}
/**
* Queries whether any threads have been waiting to acquire longer than the
* current thread.
* 查询是否有任何线程等待获取锁的时间超过当前线程
*
* <p>
* An invocation of this method is equivalent to (but may be more efficient
* than):
* 调用此方法相当于调用:getFirstQueuedThread() != Thread.currentThread() && hasQueuedThreads()
*
* <pre>
* {@code getFirstQueuedThread() != Thread.currentThread() && hasQueuedThreads()}
* </pre>
*
* <p>
* Note that because cancellations due to interrupts and timeouts may occur at
* any time, a {@code true} return does not guarantee that some other thread
* will acquire before the current thread. Likewise, it is possible for another
* thread to win a race to enqueue after this method has returned {@code false},
* due to the queue being empty.
*
* <p>
* This method is designed to be used by a fair synchronizer to avoid
* <a href="AbstractQueuedSynchronizer#barging">barging</a>. Such a
* synchronizer"s {@link #tryAcquire} method should return {@code false}, and
* its {@link #tryAcquireShared} method should return a negative value, if this
* method returns {@code true} (unless this is a reentrant acquire). For
* example, the {@codetryAcquire} method for a fair, reentrant, exclusive mode
* synchronizer might look like this:
*
* <pre>
* {@code
* protected boolean tryAcquire(int arg) {
* if (isHeldExclusively()) {
* // A reentrant acquire; increment hold count
* return true;
* } else if (hasQueuedPredecessors()) {
* return false;
* } else {
* // try to acquire normally
* }
* }}
* </pre>
*
* @return {@code true} if there is a queued thread preceding the current
* thread, and {@code false} if the current thread is at the head of the
* queue or the queue is empty
* @since 1.7
*/
public final boolean hasQueuedPredecessors() {
// The correctness of this depends on head being initialized
// before tail and on head.next being accurate if the current
// thread is first in queue.
Node t = tail; // Read fields in reverse initialization order
Node h = head;
Node s;
return h != t && ((s = h.next) == null || s.thread != Thread.currentThread());
}
// Instrumentation and monitoring methods
/**
* Returns an estimate of the number of threads waiting to acquire. The value is
* only an estimate because the number of threads may change dynamically while
* this method traverses internal data structures. This method is designed for
* use in monitoring system state, not for synchronization control.
*
* @return the estimated number of threads waiting to acquire
*/
public final int getQueueLength() {
int n = 0;
for (Node p = tail; p != null; p = p.prev) {
if (p.thread != null) {
++n;
}
}
return n;
}
/**
* Returns a collection containing threads that may be waiting to acquire.
* Because the actual set of threads may change dynamically while constructing
* this result, the returned collection is only a best-effort estimate. The
* elements of the returned collection are in no particular order. This method
* is designed to facilitate construction of subclasses that provide more
* extensive monitoring facilities.
*
* @return the collection of threads
*/
public final Collection<Thread> getQueuedThreads() {
ArrayList<Thread> list = new ArrayList<Thread>();
for (Node p = tail; p != null; p = p.prev) {
Thread t = p.thread;
if (t != null) {
list.add(t);
}
}
return list;
}
/**
* Returns a collection containing threads that may be waiting to acquire in
* exclusive mode. This has the same properties as {@link #getQueuedThreads}
* except that it only returns those threads waiting due to an exclusive
* acquire.
*
* @return the collection of threads
*/
public final Collection<Thread> getExclusiveQueuedThreads() {
ArrayList<Thread> list = new ArrayList<Thread>();
for (Node p = tail; p != null; p = p.prev) {
if (!p.isShared()) {
Thread t = p.thread;
if (t != null) {
list.add(t);
}
}
}
return list;
}
/**
* Returns a collection containing threads that may be waiting to acquire in
* shared mode. This has the same properties as {@link #getQueuedThreads} except
* that it only returns those threads waiting due to a shared acquire.
*
* @return the collection of threads
*/
public final Collection<Thread> getSharedQueuedThreads() {
ArrayList<Thread> list = new ArrayList<Thread>();
for (Node p = tail; p != null; p = p.prev) {
if (p.isShared()) {
Thread t = p.thread;
if (t != null) {
list.add(t);
}
}
}
return list;
}
/**
* Returns a string identifying this synchronizer, as well as its state. The
* state, in brackets, includes the String {@code "State ="} followed by the
* current value of {@link #getState}, and either {@code "nonempty"} or
* {@code "empty"} depending on whether the queue is empty.
*
* @return a string identifying this synchronizer, as well as its state
*/
public String toString() {
int s = getState();
String q = hasQueuedThreads() ? "non" : "";
return super.toString() + "[State = " + s + ", " + q + "empty queue]";
}
// Internal support methods for Conditions
/**
* Returns true if a node, always one that was initially placed on a condition
* queue, is now waiting to reacquire on sync queue.
*
* @param node the node
* @return true if is reacquiring
*/
final boolean isOnSyncQueue(Node node) {
if (node.waitStatus == Node.CONDITION || node.prev == null) {
return false;
}
if (node.next != null) {// If has successor, it must be on queue
return true;
}
/*
* node.prev can be non-null, but not yet on queue because the CAS to place it
* on queue can fail. So we have to traverse from tail to make sure it actually
* made it. It will always be near the tail in calls to this method, and unless
* the CAS failed (which is unlikely), it will be there, so we hardly ever
* traverse much.
*/
return findNodeFromTail(node);
}
/**
* Returns true if node is on sync queue by searching backwards from tail.
* Called only when needed by isOnSyncQueue.
*
* @return true if present
*/
private boolean findNodeFromTail(Node node) {
Node t = tail;
for (;;) {
if (t == node) {
return true;
}
if (t == null) {
return false;
}
t = t.prev;
}
}
/**
* Transfers a node from a condition queue onto sync queue. Returns true if
* successful.
*
* @param node the node
* @return true if successfully transferred (else the node was cancelled before
* signal)
*/
final boolean transferForSignal(Node node) {
/*
* If cannot change waitStatus, the node has been cancelled.
*/
if (!compareAndSetWaitStatus(node, Node.CONDITION, 0)) {
return false;
}
/*
* Splice onto queue and try to set waitStatus of predecessor to indicate that
* thread is (probably) waiting. If cancelled or attempt to set waitStatus
* fails, wake up to resync (in which case the waitStatus can be transiently and
* harmlessly wrong).
*/
Node p = enq(node);
int ws = p.waitStatus;
if (ws > 0 || !compareAndSetWaitStatus(p, ws, Node.SIGNAL)) {
LockSupport.unpark(node.thread);
}
return true;
}
/**
* Transfers node, if necessary, to sync queue after a cancelled wait. Returns
* true if thread was cancelled before being signalled.
*
* @param node the node
* @return true if cancelled before the node was signalled
*/
final boolean transferAfterCancelledWait(Node node) {
if (compareAndSetWaitStatus(node, Node.CONDITION, 0)) {
enq(node);
return true;
}
/*
* If we lost out to a signal(), then we can"t proceed until it finishes its
* enq(). Cancelling during an incomplete transfer is both rare and transient,
* so just spin.
*/
while (!isOnSyncQueue(node)) {
Thread.yield();
}
return false;
}
/**
* Invokes release with current state value; returns saved state. Cancels node
* and throws exception on failure.
*
* @param node the condition node for this wait
* @return previous sync state
*/
final int fullyRelease(Node node) {
boolean failed = true;
try {
int savedState = getState();
if (release(savedState)) {
failed = false;
return savedState;
} else {
throw new IllegalMonitorStateException();
}
} finally {
if (failed) {
node.waitStatus = Node.CANCELLED;
}
}
}
// Instrumentation methods for conditions
/**
* Queries whether the given ConditionObject uses this synchronizer as its lock.
*
* @param condition the condition
* @return {@code true} if owned
* @throws NullPointerException if the condition is null
*/
public final boolean owns(ConditionObject condition) {
return condition.isOwnedBy(this);
}
/**
* Queries whether any threads are waiting on the given condition associated
* with this synchronizer. Note that because timeouts and interrupts may occur
* at any time, a {@code true} return does not guarantee that a future
* {@code signal} will awaken any threads. This method is designed primarily for
* use in monitoring of the system state.
*
* @param condition the condition
* @return {@code true} if there are any waiting threads
* @throws IllegalMonitorStateException if exclusive synchronization is not held
* @throws IllegalArgumentException
* if the given condition is not associated with this synchronizer
* @throws NullPointerException if the condition is null
*/
public final boolean hasWaiters(ConditionObject condition) {
if (!owns(condition)) {
throw new IllegalArgumentException("Not owner");
}
return condition.hasWaiters();
}
/**
* Returns an estimate of the number of threads waiting on the given condition
* associated with this synchronizer. Note that because timeouts and interrupts
* may occur at any time, the estimate serves only as an upper bound on the
* actual number of waiters. This method is designed for use in monitoring of
* the system state, not for synchronization control.
*
* @param condition the condition
* @return the estimated number of waiting threads
* @throws IllegalMonitorStateException if exclusive synchronization is not held
* @throws IllegalArgumentException
* if the given condition is not associated with this synchronizer
* @throws NullPointerException if the condition is null
*/
public final int getWaitQueueLength(ConditionObject condition) {
if (!owns(condition)) {
throw new IllegalArgumentException("Not owner");
}
return condition.getWaitQueueLength();
}
/**
* Returns a collection containing those threads that may be waiting on the
* given condition associated with this synchronizer. Because the actual set of
* threads may change dynamically while constructing this result, the returned
* collection is only a best-effort estimate. The elements of the returned
* collection are in no particular order.
*
* @param condition the condition
* @return the collection of threads
* @throws IllegalMonitorStateException if exclusive synchronization is not held
* @throws IllegalArgumentException
* if the given condition is not associated with this synchronizer
* @throws NullPointerException if the condition is null
*/
public final Collection<Thread> getWaitingThreads(ConditionObject condition) {
if (!owns(condition)) {
throw new IllegalArgumentException("Not owner");
}
return condition.getWaitingThreads();
}
/**
* Condition implementation for a {@link AbstractQueuedSynchronizer} serving as
* the basis of a {@link Lock} implementation.
*
* <p>
* Method documentation for this class describes mechanics, not behavioral
* specifications from the point of view of Lock and Condition users. Exported
* versions of this class will in general need to be accompanied by
* documentation describing condition semantics that rely on those of the
* associated {@code AbstractQueuedSynchronizer}.
*
* <p>
* This class is Serializable, but all fields are transient, so deserialized
* conditions have no waiters.
*/
public class ConditionObject implements Condition, java.io.Serializable {
private static final long serialVersionUID = 1173984872572414699L;
/** First node of condition queue. */
private transient Node firstWaiter;
/** Last node of condition queue. */
private transient Node lastWaiter;
/**
* Creates a new {@code ConditionObject} instance.
*/
public ConditionObject() {
}
// Internal methods
/**
* Adds a new waiter to wait queue.
*
* @return its new wait node
*/
private Node addConditionWaiter() {
Node t = lastWaiter;
// If lastWaiter is cancelled, clean out.
if (t != null && t.waitStatus != Node.CONDITION) {
unlinkCancelledWaiters();
t = lastWaiter;
}
Node node = new Node(Thread.currentThread(), Node.CONDITION);
if (t == null) {
firstWaiter = node;
} else {
t.nextWaiter = node;
}
lastWaiter = node;
return node;
}
/**
* Removes and transfers nodes until hit non-cancelled one or null. Split out
* from signal in part to encourage compilers to inline the case of no waiters.
*
* @param first (non-null) the first node on condition queue
*/
private void doSignal(Node first) {
do {
if ((firstWaiter = first.nextWaiter) == null) {
lastWaiter = null;
}
first.nextWaiter = null;
} while (!transferForSignal(first) && (first = firstWaiter) != null);
}
/**
* Removes and transfers all nodes.
*
* @param first (non-null) the first node on condition queue
*/
private void doSignalAll(Node first) {
lastWaiter = firstWaiter = null;
do {
Node next = first.nextWaiter;
first.nextWaiter = null;
transferForSignal(first);
first = next;
} while (first != null);
}
/**
* Unlinks cancelled waiter nodes from condition queue. Called only while
* holding lock. This is called when cancellation occurred during condition
* wait, and upon insertion of a new waiter when lastWaiter is seen to have been
* cancelled. This method is needed to avoid garbage retention in the absence of
* signals. So even though it may require a full traversal, it comes into play
* only when timeouts or cancellations occur in the absence of signals. It
* traverses all nodes rather than stopping at a particular target to unlink all
* pointers to garbage nodes without requiring many re-traversals during
* cancellation storms.
*/
private void unlinkCancelledWaiters() {
Node t = firstWaiter;
Node trail = null;
while (t != null) {
Node next = t.nextWaiter;
if (t.waitStatus != Node.CONDITION) {
t.nextWaiter = null;
if (trail == null) {
firstWaiter = next;
} else {
trail.nextWaiter = next;
}
if (next == null) {
lastWaiter = trail;
}
} else {
trail = t;
}
t = next;
}
}
// public methods
/**
* Moves the longest-waiting thread, if one exists, from the wait queue for this
* condition to the wait queue for the owning lock.
*
* @throws IllegalMonitorStateException
* if {@link #isHeldExclusively} returns {@code false}
*/
public final void signal() {
if (!isHeldExclusively()) {
throw new IllegalMonitorStateException();
}
Node first = firstWaiter;
if (first != null) {
doSignal(first);
}
}
/**
* Moves all threads from the wait queue for this condition to the wait queue
* for the owning lock.
*
* @throws IllegalMonitorStateException
* if {@link #isHeldExclusively} returns {@code false}
*/
public final void signalAll() {
if (!isHeldExclusively()) {
throw new IllegalMonitorStateException();
}
Node first = firstWaiter;
if (first != null) {
doSignalAll(first);
}
}
/**
* Implements uninterruptible condition wait.
* 实现不可中断的condition等待
*
* <ol>
* <li>Save lock state returned by {@link #getState}.
* <li>Invoke {@link #release} with saved state as argument, throwing
* IllegalMonitorStateException if it fails.
* <li>Block until signalled.
* <li>Reacquire by invoking specialized version of {@link #acquire} with saved
* state as argument.
* </ol>
*/
public final void awaitUninterruptibly() {
Node node = addConditionWaiter();
int savedState = fullyRelease(node);
boolean interrupted = false;
while (!isOnSyncQueue(node)) {
LockSupport.park(this);
if (Thread.interrupted()) {
interrupted = true;
}
}
if (acquireQueued(node, savedState) || interrupted) {
selfInterrupt();
}
}
/*
* For interruptible waits, we need to track whether to throw
* InterruptedException, if interrupted while blocked on condition, versus
* reinterrupt current thread, if interrupted while blocked waiting to
* re-acquire.
*/
/** Mode meaning to reinterrupt on exit from wait */
private static final int REINTERRUPT = 1;
/** Mode meaning to throw InterruptedException on exit from wait */
private static final int THROW_IE = -1;
/**
* Checks for interrupt, returning THROW_IE if interrupted before signalled,
* REINTERRUPT if after signalled, or 0 if not interrupted.
*/
private int checkInterruptWhileWaiting(Node node) {
return Thread.interrupted() ? (transferAfterCancelledWait(node) ? THROW_IE : REINTERRUPT) : 0;
}
/**
* Throws InterruptedException, reinterrupts current thread, or does nothing,
* depending on mode.
*/
private void reportInterruptAfterWait(int interruptMode) throws InterruptedException {
if (interruptMode == THROW_IE) {
throw new InterruptedException();
} else if (interruptMode == REINTERRUPT) {
selfInterrupt();
}
}
/**
* Implements interruptible condition wait.
* 实现可中断的condition等待
*
* <ol>
* <li>If current thread is interrupted, throw InterruptedException.
* <li>Save lock state returned by {@link #getState}.
* <li>Invoke {@link #release} with saved state as argument, throwing
* IllegalMonitorStateException if it fails.
* <li>Block until signalled or interrupted.
* <li>Reacquire by invoking specialized version of {@link #acquire} with saved
* state as argument.
* <li>If interrupted while blocked in step 4, throw InterruptedException.
* </ol>
*/
public final void await() throws InterruptedException {
if (Thread.interrupted()) {
throw new InterruptedException();
}
Node node = addConditionWaiter();
int savedState = fullyRelease(node);
int interruptMode = 0;
while (!isOnSyncQueue(node)) {
LockSupport.park(this);
if ((interruptMode = checkInterruptWhileWaiting(node)) != 0) {
break;
}
}
if (acquireQueued(node, savedState) && interruptMode != THROW_IE) {
interruptMode = REINTERRUPT;
}
if (node.nextWaiter != null) {// clean up if cancelled
unlinkCancelledWaiters();
}
if (interruptMode != 0) {
reportInterruptAfterWait(interruptMode);
}
}
/**
* Implements timed condition wait.
* 实现超时condition等待
*
* <ol>
* <li>If current thread is interrupted, throw InterruptedException.
* <li>Save lock state returned by {@link #getState}.
* <li>Invoke {@link #release} with saved state as argument, throwing
* IllegalMonitorStateException if it fails.
* <li>Block until signalled, interrupted, or timed out.
* <li>Reacquire by invoking specialized version of {@link #acquire} with saved
* state as argument.
* <li>If interrupted while blocked in step 4, throw InterruptedException.
* </ol>
*/
public final long awaitNanos(long nanosTimeout) throws InterruptedException {
if (Thread.interrupted()) {
throw new InterruptedException();
}
Node node = addConditionWaiter();
int savedState = fullyRelease(node);
final long deadline = System.nanoTime() + nanosTimeout;
int interruptMode = 0;
while (!isOnSyncQueue(node)) {
if (nanosTimeout <= 0L) {
transferAfterCancelledWait(node);
break;
}
if (nanosTimeout >= spinForTimeoutThreshold) {
LockSupport.parkNanos(this, nanosTimeout);
}
if ((interruptMode = checkInterruptWhileWaiting(node)) != 0) {
break;
}
nanosTimeout = deadline - System.nanoTime();
}
if (acquireQueued(node, savedState) && interruptMode != THROW_IE) {
interruptMode = REINTERRUPT;
}
if (node.nextWaiter != null) {
unlinkCancelledWaiters();
}
if (interruptMode != 0) {
reportInterruptAfterWait(interruptMode);
}
return deadline - System.nanoTime();
}
/**
* Implements absolute timed condition wait.
* 实现绝对的超时condition等待
*
* <ol>
* <li>If current thread is interrupted, throw InterruptedException.
* <li>Save lock state returned by {@link #getState}.
* <li>Invoke {@link #release} with saved state as argument, throwing
* IllegalMonitorStateException if it fails.
* <li>Block until signalled, interrupted, or timed out.
* <li>Reacquire by invoking specialized version of {@link #acquire} with saved
* state as argument.
* <li>If interrupted while blocked in step 4, throw InterruptedException.
* <li>If timed out while blocked in step 4, return false, else true.
* </ol>
*/
public final boolean awaitUntil(Date deadline) throws InterruptedException {
long abstime = deadline.getTime();
if (Thread.interrupted()) {
throw new InterruptedException();
}
Node node = addConditionWaiter();
int savedState = fullyRelease(node);
boolean timedout = false;
int interruptMode = 0;
while (!isOnSyncQueue(node)) {
if (System.currentTimeMillis() > abstime) {
timedout = transferAfterCancelledWait(node);
break;
}
LockSupport.parkUntil(this, abstime);
if ((interruptMode = checkInterruptWhileWaiting(node)) != 0) {
break;
}
}
if (acquireQueued(node, savedState) && interruptMode != THROW_IE) {
interruptMode = REINTERRUPT;
}
if (node.nextWaiter != null) {
unlinkCancelledWaiters();
}
if (interruptMode != 0) {
reportInterruptAfterWait(interruptMode);
}
return !timedout;
}
/**
* Implements timed condition wait.
* 实现超时condition等待
*
* <ol>
* <li>If current thread is interrupted, throw InterruptedException.
* <li>Save lock state returned by {@link #getState}.
* <li>Invoke {@link #release} with saved state as argument, throwing
* IllegalMonitorStateException if it fails.
* <li>Block until signalled, interrupted, or timed out.
* <li>Reacquire by invoking specialized version of {@link #acquire} with saved
* state as argument.
* <li>If interrupted while blocked in step 4, throw InterruptedException.
* <li>If timed out while blocked in step 4, return false, else true.
* </ol>
*/
public final boolean await(long time, TimeUnit unit) throws InterruptedException {
long nanosTimeout = unit.toNanos(time);
if (Thread.interrupted()) {
throw new InterruptedException();
}
Node node = addConditionWaiter();
int savedState = fullyRelease(node);
final long deadline = System.nanoTime() + nanosTimeout;
boolean timedout = false;
int interruptMode = 0;
while (!isOnSyncQueue(node)) {
if (nanosTimeout <= 0L) {
timedout = transferAfterCancelledWait(node);
break;
}
if (nanosTimeout >= spinForTimeoutThreshold) {
LockSupport.parkNanos(this, nanosTimeout);
}
if ((interruptMode = checkInterruptWhileWaiting(node)) != 0) {
break;
}
nanosTimeout = deadline - System.nanoTime();
}
if (acquireQueued(node, savedState) && interruptMode != THROW_IE) {
interruptMode = REINTERRUPT;
}
if (node.nextWaiter != null) {
unlinkCancelledWaiters();
}
if (interruptMode != 0) {
reportInterruptAfterWait(interruptMode);
}
return !timedout;
}
// support for instrumentation
/**
* Returns true if this condition was created by the given synchronization
* object.
*
* @return {@code true} if owned
*/
final boolean isOwnedBy(AbstractQueuedSynchronizer sync) {
return sync == AbstractQueuedSynchronizer.this;
}
/**
* Queries whether any threads are waiting on this condition. Implements
* {@link AbstractQueuedSynchronizer#hasWaiters(ConditionObject)}.
*
* @return {@code true} if there are any waiting threads
* @throws IllegalMonitorStateException
* if {@link #isHeldExclusively} returns {@code false}
*/
protected final boolean hasWaiters() {
if (!isHeldExclusively()) {
throw new IllegalMonitorStateException();
}
for (Node w = firstWaiter; w != null; w = w.nextWaiter) {
if (w.waitStatus == Node.CONDITION) {
return true;
}
}
return false;
}
/**
* Returns an estimate of the number of threads waiting on this condition.
* Implements {@link AbstractQueuedSynchronizer#getWaitQueueLength(ConditionObject)}.
*
* @return the estimated number of waiting threads
* @throws IllegalMonitorStateException if {@link #isHeldExclusively} returns {@code false}
*/
protected final int getWaitQueueLength() {
if (!isHeldExclusively()) {
throw new IllegalMonitorStateException();
}
int n = 0;
for (Node w = firstWaiter; w != null; w = w.nextWaiter) {
if (w.waitStatus == Node.CONDITION) {
++n;
}
}
return n;
}
/**
* Returns a collection containing those threads that may be waiting on this
* Condition. Implements {@link AbstractQueuedSynchronizer#getWaitingThreads(ConditionObject)}.
*
* @return the collection of threads
* @throws IllegalMonitorStateException if {@link #isHeldExclusively} returns {@code false}
*/
protected final Collection<Thread> getWaitingThreads() {
if (!isHeldExclusively()) {
throw new IllegalMonitorStateException();
}
ArrayList<Thread> list = new ArrayList<Thread>();
for (Node w = firstWaiter; w != null; w = w.nextWaiter) {
if (w.waitStatus == Node.CONDITION) {
Thread t = w.thread;
if (t != null) {
list.add(t);
}
}
}
return list;
}
}
/**
* Setup to support compareAndSet. We need to natively implement this here: For
* the sake of permitting future enhancements, we cannot explicitly subclass
* AtomicInteger, which would be efficient and useful otherwise. So, as the
* lesser of evils, we natively implement using hotspot intrinsics API. And
* while we are at it, we do the same for other CASable fields (which could
* otherwise be done with atomic field updaters).
*/
private static final Unsafe unsafe = Unsafe.getUnsafe();
private static final long stateOffset;
private static final long headOffset;
private static final long tailOffset;
private static final long waitStatusOffset;
private static final long nextOffset;
static {
try {
stateOffset = unsafe.objectFieldOffset(AbstractQueuedSynchronizer.class.getDeclaredField("state"));
headOffset = unsafe.objectFieldOffset(AbstractQueuedSynchronizer.class.getDeclaredField("head"));
tailOffset = unsafe.objectFieldOffset(AbstractQueuedSynchronizer.class.getDeclaredField("tail"));
waitStatusOffset = unsafe.objectFieldOffset(Node.class.getDeclaredField("waitStatus"));
nextOffset = unsafe.objectFieldOffset(Node.class.getDeclaredField("next"));
} catch (Exception ex) {
throw new Error(ex);
}
}
/**
* CAS head field. Used only by enq.
*/
private final boolean compareAndSetHead(Node update) {
return unsafe.compareAndSwapObject(this, headOffset, null, update);
}
/**
* CAS tail field. Used only by enq.
*/
private final boolean compareAndSetTail(Node expect, Node update) {
return unsafe.compareAndSwapObject(this, tailOffset, expect, update);
}
/**
* CAS waitStatus field of a node.
*/
private static final boolean compareAndSetWaitStatus(Node node, int expect, int update) {
return unsafe.compareAndSwapInt(node, waitStatusOffset, expect, update);
}
/**
* CAS next field of a node.
*/
private static final boolean compareAndSetNext(Node node, Node expect, Node update) {
return unsafe.compareAndSwapObject(node, nextOffset, expect, update);
}
}
